En aquest post construirem un commutador de control remot de 10 canals basat en la banda ISM (industrial, científica i mèdica).
Introducció
El Banda ISM funciona a 2,4 GHz, que es pot utilitzar sense llicències amb una potència de sortida raonable.
El projecte proposat és un commutador sense fils ON / OFF per a usos generals, que es pot utilitzar per encendre / apagar llums, ventiladors, electrodomèstics a la domòtica si té la suficient confiança per portar alteracions de maquinari o programari a aquest projecte.
El projecte es divideix en dues parts: el comandament a distància i el receptor.
El control remot:
El comandament a distància consta de 10 polsadors per controlar 10 relés individuals al receptor. El comandament a distància funciona amb una bateria de 9V que el fa portàtil.
El cor del projecte és el mòdul transceptor NRF24L01 de 2,4 GHz que fa possible la comunicació entre dos Arduinos.
El control remot té un LED de reconeixement.
El LED de confirmació s’encendrà momentàniament cada vegada que premem un botó del comandament i només si el receptor rep el senyal transmès i el receptor envia un senyal de retroalimentació al comandament per activar el LED.
Aquest procés garantirà que l’ordre ON / OFF del controlador remot arribi a la seva destinació amb una confirmació visual.
Es proporciona un commutador ON / OFF al circuit del controlador remot per evitar pèrdues d’energia excessives mentre es troba inactiu.
Es recomana Arduino Nano o Arduino Pro-mini per construir el comandament a distància, ja que té un factor de forma més petit que fa que sigui portàtil.
Esquema de connexions:

L’anterior és l’esquema complet del circuit del comandament a distància. El diagrama de connexió de pins per a NRF24L01 també es dóna en el mateix esquema.
Apagueu el comandament quan hàgiu acabat.
Descarregueu el fitxer de la biblioteca aquí: github.com/nRF24/RF24.git
Programa per a control remot:
//-----Program Developed by R.Girish----//
#include
#include
RF24 radio(9,10)
const byte address[][6] = {'00001', '00002'}
const int ip1 = 2
const int ip2 = 3
const int ip3 = 4
const int ip4 = 5
const int ip5 = 6
const int ip6 = 7
const int ip7 = 8
const int ip8 = A0
const int ip9 = A1
const int ip10 = A2
const int buzzer = A3
char buzzchar[32] = ''
const char constbuzzer[32] = 'buzz'
const char button1[32] = 'activate_1'
const char button2[32] = 'activate_2'
const char button3[32] = 'activate_3'
const char button4[32] = 'activate_4'
const char button5[32] = 'activate_5'
const char button6[32] = 'activate_6'
const char button7[32] = 'activate_7'
const char button8[32] = 'activate_8'
const char button9[32] = 'activate_9'
const char button10[32] = 'activate_10'
void setup()
{
pinMode(ip1, INPUT)
pinMode(ip2, INPUT)
pinMode(ip3, INPUT)
pinMode(ip4, INPUT)
pinMode(ip5, INPUT)
pinMode(ip6, INPUT)
pinMode(ip7, INPUT)
pinMode(ip8, INPUT)
pinMode(ip9, INPUT)
pinMode(ip10, INPUT)
pinMode(buzzer, OUTPUT)
digitalWrite(ip1, HIGH)
digitalWrite(ip2, HIGH)
digitalWrite(ip3, HIGH)
digitalWrite(ip4, HIGH)
digitalWrite(ip5, HIGH)
digitalWrite(ip6, HIGH)
digitalWrite(ip7, HIGH)
digitalWrite(ip8, HIGH)
digitalWrite(ip9, HIGH)
digitalWrite(ip10, HIGH)
radio.begin()
radio.openWritingPipe(address[1])
radio.openReadingPipe(1, address[0])
radio.setChannel(100)
radio.setDataRate(RF24_250KBPS)
radio.setPALevel(RF24_PA_MAX)
radio.stopListening()
}
void loop()
{
if(digitalRead(ip1) == LOW)
{
radio.write(&button1, sizeof(button1))
radio.startListening()
while(!radio.available())
radio.read(&buzzchar, sizeof(buzzchar))
if(strcmp(buzzchar,constbuzzer) == 0)
{
digitalWrite(buzzer, HIGH)
delay(500)
digitalWrite(buzzer,LOW)
}
radio.stopListening()
}
if(digitalRead(ip2) == LOW)
{
radio.write(&button2, sizeof(button2))
radio.startListening()
while(!radio.available())
radio.read(&buzzchar, sizeof(buzzchar))
if(strcmp(buzzchar,constbuzzer) == 0)
{
digitalWrite(buzzer, HIGH)
delay(500)
digitalWrite(buzzer,LOW)
}
radio.stopListening()
}
if(digitalRead(ip3) == LOW)
{
radio.write(&button3, sizeof(button3))
radio.startListening()
while(!radio.available())
radio.read(&buzzchar, sizeof(buzzchar))
if(strcmp(buzzchar,constbuzzer) == 0)
{
digitalWrite(buzzer, HIGH)
delay(500)
digitalWrite(buzzer,LOW)
}
radio.stopListening()
}
if(digitalRead(ip4) == LOW)
{
radio.write(&button4, sizeof(button4))
radio.startListening()
while(!radio.available())
radio.read(&buzzchar, sizeof(buzzchar))
if(strcmp(buzzchar,constbuzzer) == 0)
{
digitalWrite(buzzer, HIGH)
delay(500)
digitalWrite(buzzer,LOW)
}
radio.stopListening()
}
if(digitalRead(ip5) == LOW)
{
radio.write(&button5, sizeof(button5))
radio.startListening()
while(!radio.available())
radio.read(&buzzchar, sizeof(buzzchar))
if(strcmp(buzzchar,constbuzzer) == 0)
{
digitalWrite(buzzer, HIGH)
delay(500)
digitalWrite(buzzer,LOW)
}
radio.stopListening()
}
if(digitalRead(ip6) == LOW)
{
radio.write(&button6, sizeof(button6))
radio.startListening()
while(!radio.available())
radio.read(&buzzchar, sizeof(buzzchar))
if(strcmp(buzzchar,constbuzzer) == 0)
{
digitalWrite(buzzer, HIGH)
delay(500)
digitalWrite(buzzer,LOW)
}
radio.stopListening()
}
if(digitalRead(ip7) == LOW)
{
radio.write(&button7, sizeof(button7))
radio.startListening()
while(!radio.available())
radio.read(&buzzchar, sizeof(buzzchar))
if(strcmp(buzzchar,constbuzzer) == 0)
{
digitalWrite(buzzer, HIGH)
delay(500)
digitalWrite(buzzer,LOW)
}
radio.stopListening()
}
if(digitalRead(ip8) == LOW)
{
radio.write(&button8, sizeof(button8))
radio.startListening()
while(!radio.available())
radio.read(&buzzchar, sizeof(buzzchar))
if(strcmp(buzzchar,constbuzzer) == 0)
{
digitalWrite(buzzer, HIGH)
delay(500)
digitalWrite(buzzer,LOW)
}
radio.stopListening()
}
if(digitalRead(ip9) == LOW)
{
radio.write(&button9, sizeof(button9))
radio.startListening()
while(!radio.available())
radio.read(&buzzchar, sizeof(buzzchar))
if(strcmp(buzzchar,constbuzzer) == 0)
{
digitalWrite(buzzer, HIGH)
delay(500)
digitalWrite(buzzer,LOW)
}
radio.stopListening()
}
if(digitalRead(ip10) == LOW)
{
radio.write(&button10, sizeof(button10))
radio.startListening()
while(!radio.available())
radio.read(&buzzchar, sizeof(buzzchar))
if(strcmp(buzzchar,constbuzzer) == 0)
{
digitalWrite(buzzer, HIGH)
delay(500)
digitalWrite(buzzer,LOW)
}
radio.stopListening()
}
}
//-----Program Developed by R.Girish----//
Això conclou el circuit del control remot.
El receptor:
El circuit receptor està format per Arduino que pot ser la vostra elecció, 10 resistències limitadores de corrent de 330 ohm, 10 transistors i 10 relés formen l’etapa de sortida.
A cadascun dels 10 pins de sortida d'Arduino es connecta a 10 relés mitjançant resistència i transistor.
Assegureu-vos que la vostra font d'alimentació sigui capaç de proporcionar com a mínim 1A de corrent necessari per operar diversos relés en un instant.
Un mòdul transceptor NRF24L01 de 2,4 GHz proporciona comunicació entre comandaments remots.
Esquema de connexions:

Si esteu confós amb el diagrama de cablejat entre Arduino i el mòdul NRF24L01, només cal que mireu la taula que hi ha al costat de l’esquema, també és el mateix per al circuit del controlador remot.
La seqüència de sortida i els pins de sortida són els següents:
PIN Arduino: seqüència de sortida
PIN 2 - SORTIDA 1
PIN 3 - SORTIDA 2
PIN 4 - SORTIDA 3
PIN 5 - SORTIDA 4
PIN 6 - SORTIDA 5
PIN 7 - SORTIDA 6
PIN 8 - SORTIDA 7
PIN A0 - SORTIDA 8
PIN A1 - SORTIDA 9
PIN A2 - SORTIDA 10
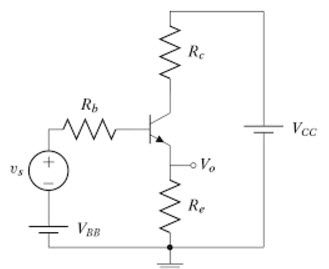
Etapa de sortida:

La sortida només es mostra amb dues etapes de sortida per simplificar el diagrama. Heu d’ampliar-lo a deu, si utilitzeu els 10 canals.
Programa per al receptor:
//-----Program Developed by R.Girish----//
#include
#include
RF24 radio(9,10)
const byte address[][6] = {'00001', '00002'}
const int op1 = 2
const int op2 = 3
const int op3 = 4
const int op4 = 5
const int op5 = 6
const int op6 = 7
const int op7 = 8
const int op8 = A0
const int op9 = A1
const int op10 = A2
const char buzzer[32] = 'buzz'
char buttonstate[32] = ''
const char button1[32] = 'activate_1'
const char button2[32] = 'activate_2'
const char button3[32] = 'activate_3'
const char button4[32] = 'activate_4'
const char button5[32] = 'activate_5'
const char button6[32] = 'activate_6'
const char button7[32] = 'activate_7'
const char button8[32] = 'activate_8'
const char button9[32] = 'activate_9'
const char button10[32] = 'activate_10'
boolean status1 = false
boolean status2 = false
boolean status3 = false
boolean status4 = false
boolean status5 = false
boolean status6 = false
boolean status7 = false
boolean status8 = false
boolean status9 = false
boolean status10 = false
void setup()
{
Serial.begin(9600)
pinMode(op1, OUTPUT)
pinMode(op2, OUTPUT)
pinMode(op3, OUTPUT)
pinMode(op4, OUTPUT)
pinMode(op5, OUTPUT)
pinMode(op6, OUTPUT)
pinMode(op7, OUTPUT)
pinMode(op8, OUTPUT)
pinMode(op9, OUTPUT)
pinMode(op10, OUTPUT)
radio.begin()
radio.openReadingPipe(1, address[1])
radio.openWritingPipe(address[0])
radio.setChannel(100)
radio.setDataRate(RF24_250KBPS)
radio.setPALevel(RF24_PA_MAX)
radio.startListening()
}
void loop()
{
while(!radio.available())
radio.read(&buttonstate, sizeof(buttonstate))
Serial.println(buttonstate)
if((strcmp(buttonstate,button1) == 0) && status1 == false)
{
digitalWrite(op1, HIGH)
status1 = true
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button1) == 0) && status1 == true)
{
digitalWrite(op1, LOW)
status1 = false
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button2) == 0) && status2 == false)
{
digitalWrite(op2, HIGH)
status2 = true
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button2) == 0) && status2 == true)
{
digitalWrite(op2, LOW)
status2 = false
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button3) == 0) && status3 == false)
{
digitalWrite(op3, HIGH)
status3 = true
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button3) == 0) && status3 == true)
{
digitalWrite(op3, LOW)
status3 = false
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button4) == 0) && status4 == false)
{
digitalWrite(op4, HIGH)
status4 = true
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button4) == 0) && status4 == true)
{
digitalWrite(op4, LOW)
status4 = false
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button5) == 0) && status5 == false)
{
digitalWrite(op5, HIGH)
status5 = true
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button5) == 0) && status5 == true)
{
digitalWrite(op5, LOW)
status5 = false
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button6) == 0) && status6 == false)
{
digitalWrite(op6, HIGH)
status6 = true
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button6) == 0) && status6 == true)
{
digitalWrite(op6, LOW)
status6 = false
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button7) == 0) && status7 == false)
{
digitalWrite(op7, HIGH)
status7 = true
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button7) == 0) && status7 == true)
{
digitalWrite(op7, LOW)
status7 = false
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button8) == 0) && status8 == false)
{
digitalWrite(op8, HIGH)
status8 = true
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button8) == 0) && status8 == true)
{
digitalWrite(op8, LOW)
status8 = false
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button9) == 0) && status9 == false)
{
digitalWrite(op9, HIGH)
status9 = true
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button9) == 0) && status9 == true)
{
digitalWrite(op9, LOW)
status9 = false
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button10) == 0) && status10 == false)
{
digitalWrite(op10, HIGH)
status10 = true
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button10) == 0) && status10 == true)
{
digitalWrite(op10, LOW)
status10 = false
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
}
//-----Program Developed by R.Girish----//
Això conclou el receptor.
Té un abast teòric de 100 metres pràcticament pot funcionar al voltant de 30 metres i més, pot variar en funció dels sòlids obstacles entre el comandament i el receptor.
Com operar aquest projecte:
• Engegueu primer el receptor i després el control remot.
• Premeu qualsevol dels botons del comandament a la vegada.
• Si premeu el primer botó, s'activarà la sortida corresponent, és a dir, la sortida 1 s'activa. Si torneu a prémer el mateix botó del control remot, desactivarà la sortida 1 del receptor.
• S’aplica a tots els botons i 10 sortides.
• Apagueu el comandament després d'utilitzar-lo.
Si teniu més preguntes sobre el commutador de control remot de 10 canals a 2,4 GHz de 10 canals, expresseu-los a la secció de comentaris.
Anterior: Circuit de generador de senyal Arduino PWM Següent: Com executar un servomotor mitjançant IC 555