Un circuit que permet que un motor connectat funcioni en sentit horari i antihorari a través de disparadors d’entrada alternatius s’anomena circuit de control bidireccional.
El primer disseny següent tracta d'un circuit de controlador de motor bidireccional basat en pont complet o pont H que utilitza els 4 opamps de l'IC LM324. Al segon article coneixem un circuit de control de motor bidireccional d’alt parell amb IC 556
Introducció
En general, interruptors mecànics estan acostumats a ajustar el sentit de gir d’un motor de corrent continu. Ajustant la polaritat de la tensió utilitzada i el motor gira en sentit contrari.
D’una banda, això pot tenir l’inconvenient que cal afegir un commutador DPDT per alterar la polaritat del voltatge, però només ens ocupem d’un commutador que facilita el procediment.
Tot i que el DPDT pot tenir un problema greu, no es recomana invertir bruscament la tensió sobre un motor de corrent continu durant el seu moviment de rotació. Això pot provocar un augment actual, que possiblement podria cremar el controlador de velocitat associat.
A més, qualsevol tipus d’esforç mecànic també pot provocar problemes similars. Aquest circuit supera aquestes complicacions fàcilment. La direcció i la velocitat es manipulen amb l’ajut d’un potenciòmetre solitari. Girar l’olla en una direcció especificada fa que el motor comenci a girar.
Canviar l’olla en la direcció oposada permet que el motor giri en moviment invers. La posició central de l'olla apaga el motor, assegurant-se que el motor es ralenteix primer i després s'atura abans de fer un esforç per canviar la direcció.
Especificacions tècniques
voltatge: El circuit i el motor fan ús de la font d'alimentació comuna. Això implica que a causa del voltatge de treball més alt de la LM324 és de 32VDC, de la mateixa manera es converteix en el voltatge màxim accessible per fer funcionar el motor.
Actual: L'IRFZ44 MOSFET està dissenyat per a 49A, l'IRF4905 serà capaç de manejar 74A. No obstant això, les pistes de PCB que van des dels passadors MOSFET fins al bloc de borns de cargol només poden gestionar aproximadament 5A. Això es podria millorar soldant peces de filferro de coure sobre les vies del PCB.
En aquest cas, assegureu-vos que els MOSFET no s’escalfin massa; si ho fan, caldrà muntar dissipadors de calor més grans en aquests dispositius.
LM324 Pinouts

CONTROL BIDIRECCIONAL DE MOTORS DE CONTINUACIÓ AMB LM324
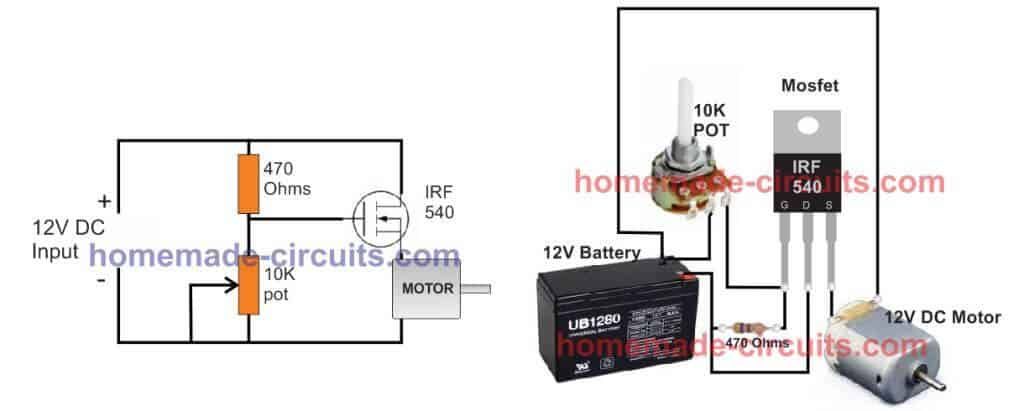
Fonamentalment, hi trobareu tres maneres de fer-ho ajusteu la velocitat dels motors de corrent continu :
1. Mitjançant l’ús d’engranatges mecanitzats per aconseguir l’acceleració ideal: Aquest enfocament sovint supera la comoditat de la majoria dels entusiastes que practiquen en tallers casolans.
2. Disminució de la tensió del motor a través d’una resistència de sèrie. Això pot ser certament ineficient (la potència es dissiparà a la resistència) i també resultarà en la reducció del parell.
El corrent consumit pel motor també augmenta a mesura que augmenta la càrrega del motor. L’augment de corrent significa una caiguda de tensió superior a la resistència de la sèrie i, per tant, una caiguda de tensió per al motor.
Aleshores, el motor fa un esforç per treure una quantitat encara més elevada de corrent, cosa que fa que el motor s’aturi.
3. En aplicar tota la tensió d’alimentació al motor en polsos curts: Aquest mètode elimina l'efecte de caiguda de la sèrie. Això es coneix com modulació d'amplada d'impuls (PWM) i és l'estratègia que es troba en aquest circuit. Els polsos ràpids permeten que el motor funcioni lentament, els polsos prolongats permeten que el motor funcioni més ràpidament.

COM FUNCIONA (consulteu l'esquema)
El circuit es podria dividir en quatre etapes:
1. Motor control - IC1: A
2. Generador d'ona triangular - IC1: B
3. Comparadors de tensió - IC1: C i D
4. Accionament del motor - Q3-6
Comencem amb l’etapa del conductor del motor, centrada al voltant dels MOSFET Q3-6. Només un parell d'aquests MOSFET romanen en estat activat en qualsevol moment. Mentre Q3 i Q6 estan activats, el corrent es mou pel motor i fa que giri en una sola direcció.
Tan bon punt Q4 i Q5 es troben en condicions de funcionament, la circulació de corrent s’inverteix i el motor comença a girar en el sentit contrari. IC1: C i IC1: D tracten de quins MOSFET s’encenen.
Opamps IC1: C i IC1: D estan connectats com a comparadors de tensió. La tensió de referència per a aquests opamps és produïda pel divisor de tensió de la resistència de R6, R7 i R8.
Tingueu en compte que la tensió de referència per a IC1: D està connectada a l’entrada ‘+’, però per a IC1: C està acoblada a l’entrada ‘-’.
Això significa que IC1: D s’activa amb una tensió superior a la seva referència mentre que IC1: C es sol·licita amb una tensió inferior a la seva referència. Opamp IC1: B es configura com un generador d'ona triangular i subministra el senyal d'activació als comparadors de voltatge corresponents.
La freqüència és aproximadament la inversa de la constant de temps de R5 i C1 - 270Hz per als valors emprats.
La disminució de R5 o C1 augmenta la freqüència augmentant qualsevol d’aquests, reduirà la freqüència. El nivell de sortida de pic a pic de l’ona triangular és molt inferior a la diferència entre les dues referències de voltatge.
Per tant, és extremadament difícil que tots dos comparadors s’activin al mateix temps. O bé, els 4 MOSFET començarien a dirigir-se, donant lloc a un curtcircuit i arruïnant-los tots.
La forma d'ona del triangle s'estructura al voltant d'una tensió de desplaçament continu. Augmentar o disminuir la tensió de desplaçament varia adequadament la posició del pols de l’ona triangular.
Canviar l’ona triangular cap amunt permet que el comparador IC1: D s’activi disminuint, es tradueix en l’activació del comparador IC1: C. Quan el nivell de tensió de l’ona triangular es troba al mig de les dues referències de tensió, no s’indueix cap dels comparadors.
Això proporciona una font de tensió de baixa impedància de sortida, cosa que permet que el voltatge de compensació de CC sigui menys vulnerable a l’impacte de càrrega de l’IC1: B.
A mesura que es commuta el 'pot', el voltatge de compensació de CC comença a variar, cap amunt o cap avall en funció de la direcció cap a on es capgiri el pot. El díode D3 presenta una protecció inversa de polaritat per al controlador.
La resistència R15 i el condensador C2 són un simple filtre de pas baix. Es tracta de netejar els pics de tensió provocats pels MOSFET quan activen l'alimentació del motor.
Llista de peces

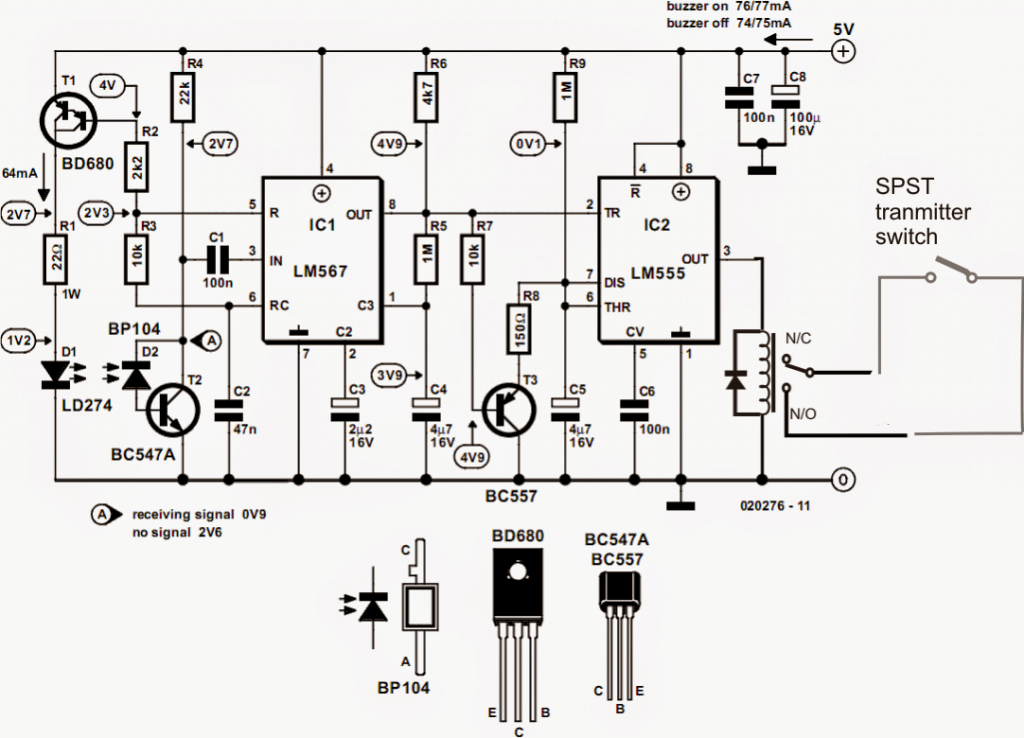
2) Control del motor bidireccional mitjançant IC 556
El control de velocitat i bidireccional dels motors de corrent continu és relativament senzill d’implementar. Per als motors amb energia independent, la velocitat és, en principi, una funció lineal de la tensió d’alimentació Els motors amb imant permanent són una subcategoria de motors amb energia independent i s’utilitzen sovint en joguines i models.
En aquest circuit, la tensió d'alimentació del motor varia mitjançant la modulació de l'amplada d'impulsos (PWM) que garanteix una bona eficiència i un parell relativament elevat a baixes velocitats del motor. Un voltatge de control únic entre 0 i +10 V permet invertir la velocitat del motor i variar de zero a màxima en ambdues direccions.
El CI multivibrador Astable es configura com un oscil·lador de 80 Hz i determina la freqüència del senyal PWM. La font actual T1 cobra Ca. La tensió de dents de serra d’aquest condensador es compara amb la tensió de control de 1C2, que emet el senyal PWM al buffer N1-Na o NPN1. El controlador de motor basat en Darlington és un circuit de pont capaç de conduir càrregues de fins a 4 amperis, sempre que el corrent d’entrada es mantingui per sota de 5 amperis i es proporciona una refrigeració suficient per als transistors de potència T1 -T. Els díodes D1, D5 ofereixen protecció contra les sobretensions inductives del motor L'interruptor S1 permet invertir la direcció del motor a l'instant.

Imatges de prototipus



Anterior: Descripció dels circuits d'amplificadors Següent: Com connectar transistors (BJT) i MOSFET amb Arduino