En aquest article es parla de la creació d’un circuit senzill de control de velocitat del motor d’inducció trifàsica, que també es pot aplicar per a un motor d’inducció monofàsic o, literalment, per a qualsevol tipus de motor de corrent altern.
Quan es tracta de controlar la velocitat dels motors d’inducció , normalment s'utilitzen convertidors de matriu, que impliquen moltes etapes complexes com ara filtres LC, matrius bidireccionals de commutadors (mitjançant IGBT), etc.
Tots aquests s’utilitzen per aconseguir en última instància un senyal de CA picat el cicle de treball del qual es podria ajustar mitjançant un complex circuit de microcontroladors, proporcionant finalment el control de velocitat del motor requerit.
No obstant això, podem experimentar i intentar aconseguir un control de velocitat del motor d’inducció trifàsic mitjançant un concepte molt més senzill mitjançant els avançats circuits integrats d’acobladors optoacobladors del detector de creuament de zero, un triac de potència i un circuit PWM.
Utilitzant l’acoblador opto del detector de creuament zero
Gràcies a la sèrie MOC d’optocopladors que ha fet que els circuits de control triac siguin extremadament segurs i fàcils de configurar, i permeten una integració PWM sense problemes per als controls previstos.
En una de les meves publicacions anteriors vaig parlar d'un simple Circuit de controlador de motor d’arrencada suau PWM que va implementar el MOC3063 IC per proporcionar un arrencada suau eficaç al motor connectat.
També aquí fem servir un mètode idèntic per aplicar el circuit de control de velocitat del motor d’inducció trifàsic proposat, la imatge següent mostra com es pot fer:
A la figura podem veure tres fases d’acoblador opto MOC idèntiques configurades en el seu mode de regulador triac estàndard i el costat d’entrada integrat amb un circuit senzill IC 555 PWM .
Els 3 circuits MOC estan configurats per manejar l’entrada de corrent trifàsica i lliurar-los al motor d’inducció connectat.
L’entrada PWM al control de LED aïllat de l’opto determina la proporció de picada de l’entrada trifàsica de CA que el MOC ICS està processant.
Ús del controlador IC 555 PWM (commutació de voltatge zero)
Això implica, ajustant el fitxer Pot PWM associat amb el 555 IC es pot controlar eficaçment la velocitat del motor d’inducció.
La sortida al seu pin número 3 ve amb un cicle de treball variable que al seu torn commuta els triacs de sortida en conseqüència, donant lloc a augmentar el valor de CA RMS o disminuir el mateix.
Augmentar el RMS mitjançant PWM més amplis permet adquirir una velocitat més alta al motor, mentre que disminuir el RMS de CA mitjançant PWM més estretes produeix un efecte contrari, és a dir, fa que el motor disminueixi proporcionalment.
Les funcions anteriors s’implementen amb molta precisió i seguretat, ja que els IC s’assignen amb moltes funcions internes sofisticades, específicament destinades a triacs de conducció i càrregues inductives pesades com ara motors d’inducció, solenoides, vàlvules, contactors, relés d’estat sòlid, etc.
L'IC també garanteix un funcionament perfectament aïllat per a l'escenari de CC que permet a l'usuari realitzar els ajustos sense por a una descàrrega elèctrica.
El principi també es pot utilitzar de manera eficient per controlar la velocitat del motor monofàsic, mitjançant un IC MOC únic en lloc de 3.
El disseny es basa en realitat impuls triac proporcional al temps teoria. El circuit PWM superior IC555 es pot ajustar per produir un cicle de treball del 50% a una freqüència molt superior, mentre que el circuit PWM inferior es pot utilitzar per implementar l’operació de control de velocitat del motor d’inducció mitjançant els ajustos del pot associat.
Es recomana que aquest IC 555 tingui una freqüència relativament inferior a la del circuit IC 555 superior. Això es pot fer augmentant el condensador de pin # 6/2 a uns 100nF.

NOTA: AFEGIR INDUCTORS ADEQUATS A LA SÈRIE AMB ELS FILS DE FASE PODEN MILLORAR DRÀSTICAMENT EL RENDIMENT DE CONTROL DE VELOCITAT DEL SISTEMA.
Assumpte de forma d'ona i control de fase mitjançant el concepte anterior:

El mètode explicat anteriorment per controlar un motor d’inducció trifàsic és realment bastant brut, ja que sí no V / Hz control .
Simplement utilitza l’encesa / apagada de la xarxa elèctrica a diferents velocitats per produir una potència mitjana al motor i controlar la velocitat alterant aquesta corrent alterna mitjana al motor.
Imagineu-vos si enceneu / apagueu el motor manualment 40 vegades o 50 vegades per minut. Això provocaria que el motor es redueixi fins a obtenir un valor mitjà relatiu, tot i que es mogui contínuament. El principi anterior funciona de la mateixa manera.
Un enfocament més tècnic és dissenyar un circuit que garanteixi un control adequat de la relació V / Hz i l’ajusti automàticament en funció de la velocitat de la relliscada o de qualsevol fluctuació de tensió.
Per a això, bàsicament fem servir les etapes següents:
- Circuit de pilots H-Bridge o Full Bridge IGBT
- Etapa del generador trifàsic per alimentar el circuit de pont complet
- Processador PWM V / Hz
Utilització d’un circuit de control IGBT Full Bridge
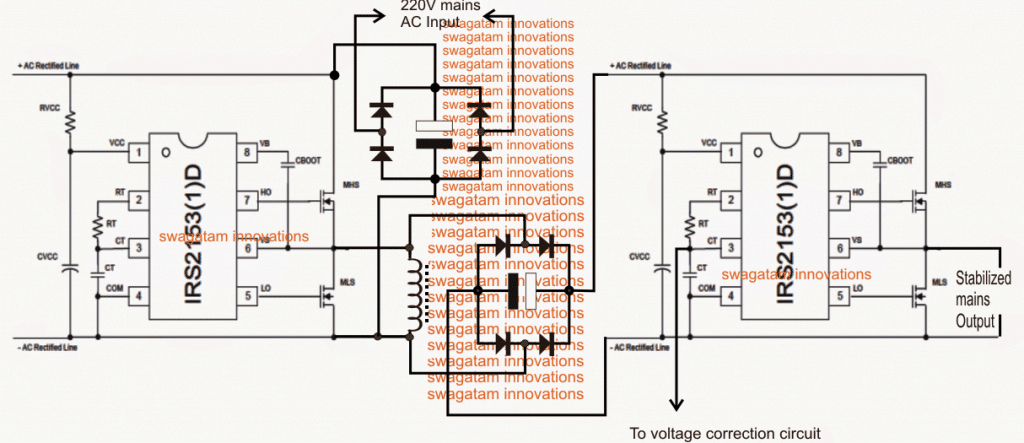
Si els procediments d’instal·lació del disseny basat en triac anterior us semblen descoratjadors, es podria provar el següent control de velocitat del motor d’inducció basat en PWM de pont complet:

El circuit mostrat a la figura anterior utilitza un únic controlador de pont complet de xip IC IRS2330 (l’última versió és 6EDL04I06NT) que té totes les funcions incorporades per tal de satisfer un funcionament segur i perfecte del motor trifàsic.
L'IC només necessita una entrada lògica de 3 fases sincronitzada a través dels pinouts HIN / LIN per generar la sortida oscil·lant de 3 fases necessària, que finalment s'utilitza per operar la xarxa IGBT de pont complet i el motor trifàsic connectat.
El control de velocitat injecció PWM s’implementa a través de 3 etapes de controladors NPN / PNP mig pont separades, controlades amb una alimentació SPWM des d’un generador IC 555 PWM tal com es veu en els nostres dissenys anteriors. Aquest nivell PWM es pot utilitzar en última instància per controlar la velocitat del motor d’inducció.
Abans d’aprendre el mètode de control de velocitat real del motor d’inducció, primer entenem com funciona l’automàtic V / Hz control es pot aconseguir utilitzant uns quants circuits IC 555, com es descriu a continuació
Circuit automàtic del processador PWM V / Hz (bucle tancat)
A les seccions anteriors vam conèixer els dissenys que ajudaran el motor d’inducció a moure’s a la velocitat especificada pel fabricant, però no s’ajustarà d’acord amb una relació constant V / Hz tret que el següent processador PWM estigui integrat amb l’H - Alimentació d'entrada Bridge PWM.

El circuit anterior és senzill Generador de PWM amb un parell d’IC 555 . L'IC1 genera la freqüència PWM que es converteix en ones triangulars al pin número 6 de l'IC2 amb l'ajut de R4 / C3.
Aquestes ones triangulars es comparen amb l’ondulació d’ona sinusoïdal al pin número 5 d’IC2. Aquestes ondulacions de mostra s’adquireixen rectificant la xarxa de corrent altern de 3 fases en una ondulació de 12V CA i s’alimenta al pin número 5 de l’IC2 per al processament requerit.
En comparar les dues formes d’ona, una dimensió adequada Es genera SPWM al pin núm. 3 d'IC2, que es converteix en el PWM impulsor de la xarxa de pont H.
Com funciona el circuit V / Hz
Quan s’encén l’alimentació, el condensador al pin # 5 comença fent una tensió nul·la al pin # 5 que provoca el valor SPWM més baix al Circuit de pont H , que al seu torn permet arrencar el motor d’inducció amb un arrencada suau gradual i lenta.
A mesura que es carrega aquest condensador, augmenta el potencial del pin # 5, que augmenta proporcionalment el SPWM i permet que el motor guanyi velocitat gradualment.
També podem veure un circuit de retroalimentació del tacòmetre que també està integrat amb el pin número 5 de l’IC2.
Això TACHOMETER controla la velocitat del rotor o la velocitat de lliscament i genera tensió addicional al pin número 5 de l’IC2.
Ara, a mesura que augmenta la velocitat del motor, la velocitat de lliscament intenta sincronitzar-se amb la freqüència de l’estator i en el procés comença a guanyar velocitat.
Aquest augment de la relliscada d’inducció augmenta proporcionalment la tensió del tacòmetre, cosa que provoca que IC2 augmenti la Sortida SPWM i això al seu torn augmenta encara més la velocitat del motor.
L'ajust anterior intenta mantenir la relació V / Hz a un nivell bastant constant fins que finalment el SPWM de l'IC2 no pot augmentar més.
En aquest moment, la velocitat de lliscament i la velocitat de l’estator adquireixen un estat estacionari i es manté fins que la tensió d’entrada o la velocitat de lliscament (a causa de la càrrega) no s’alterin. En cas que s’alterin, el circuit del processador V / Hz torna a entrar en acció i comença a ajustar la relació per mantenir la resposta òptima de la velocitat del motor d’inducció.
El tacòmetre
El Circuit del tacòmetre també es pot construir econòmicament mitjançant el següent circuit senzill i integrar-se amb les etapes del circuit explicades anteriorment:

Com implementar el control de velocitat
En els paràgrafs anteriors vam entendre el procés de regulació automàtica que es pot aconseguir integrant a retroalimentació del tacòmetre a un circuit de control SPWM de regulació automàtica.
Ara anem a saber com es pot controlar la velocitat d’un motor d’inducció variant la freqüència, cosa que obligarà al SPWM a baixar i mantenir la relació correcta V / Hz.
El següent diagrama explica l’etapa de control de velocitat:

Aquí podem veure un circuit generador trifàsic que utilitza IC 4035, la freqüència de desplaçament de fase es pot variar variant l’entrada del rellotge al seu pin # 6.
Els senyals de 3 fases s’apliquen a través de les portes IC 4049 per produir les fonts HIN, LIN necessàries per a la xarxa de controladors de pont complet.
Això implica que, variant adequadament la freqüència de rellotge de l'IC 4035, podem canviar efectivament la freqüència trifàsica de funcionament del motor d'inducció.
Això s’implementa a través d’un senzill circuit astable IC 555 que alimenta una freqüència ajustable al pin número 6 de l’IC 4035 i permet ajustar la freqüència a través del pot de 100K adjunt. El condensador C s’ha de calcular de manera que el rang de freqüència ajustable s’ajusti a l’especificació correcta del motor d’inducció connectat.
Quan la potència de freqüència varia, la freqüència efectiva del motor d’inducció també canvia, cosa que modifica la velocitat del motor corresponent.
Per exemple, quan es redueix la freqüència, es redueix la velocitat del motor, cosa que al seu torn fa que la sortida del tacòmetre redueixi el voltatge proporcionalment.
Aquesta reducció proporcional de la sortida del tacòmetre obliga a reduir el SPWM i, per tant, fa baixar la tensió de sortida al motor proporcionalment.
Al seu torn, aquesta acció garanteix que es mantingui la relació V / Hz mentre es controla la velocitat del motor d’inducció mitjançant el control de freqüència.
Advertència: el concepte anterior es dissenya només en supòsits teòrics. Per favor, procediu amb precaució.
Si teniu més dubtes sobre aquest disseny de controlador de velocitat del motor d’inducció trifàsic, us recomanem que publiqueu el mateix a través dels vostres comentaris.
Anterior: Com dissenyar un circuit d'alimentació ininterrompuda (SAI) Següent: Activar / desactivar dues càrregues alternatives amb IC 555