En aquest missatge coneixerem un circuit senzill que permet una funció d’ajust manual per a la sincronització d’espurna del CDI d’una motocicleta, ja sigui per aconseguir un encès avançat, un encès retardat o simplement un encès temporitzat normal.
Després d’un ampli estudi sobre el tema, aparentment vaig tenir èxit en el disseny d’aquest circuit que qualsevol pilot de motocicletes pot utilitzar per aconseguir una velocitat i un consum de combustible millorats ajustant el temps d’encesa del motor del vehicle segons es desitgi, en funció de la seva velocitat instantània.
Temporització d'encesa d'encesa
Tots sabem que la sincronització de l’espurna d’encesa generada a l’interior d’un motor del vehicle és crucial en termes d’eficiència de combustible, vida útil del motor i velocitat del vehicle, les espurnes CDI temporitzades incorrectament poden produir un vehicle mal funcionat i viceversa.
El temps d’encesa recomanat per a l’espurna a l’interior de la cambra de combustió és quan el pistó està a uns 10 graus després d’haver creuat el punt TDC (Top Dead Center). La bobina de recollida s'ajusta per correspondre a això i cada vegada que el pistó arriba just abans del TDC, la bobina de captació activa la bobina CDI per disparar l'espurna, denominada BTDC (abans del punt mort superior).
La combustió feta amb el procés anterior produeix generalment un bon funcionament del motor i emissions.
Tanmateix, l’anterior funciona bé sempre que el motor funcioni a una velocitat mitjana recomanada, però per a les motocicletes dissenyades per assolir velocitats extraordinàries, la idea anterior comença a funcionar malament i la moto no pot aconseguir les altes velocitats especificades.
Sincronització del temps d’espurna amb velocitats variables
Això passa perquè a velocitats més altes el pistó es mou molt ràpidament del que l’espurna d’encesa pot anticipar. Tot i que el circuit CDI inicia l’activació correctament i intenta complementar la posició del pistó, en el moment en què l’espurna és capaç d’encendre a la bugia, el pistó ja ha viatjat molt per davant del TDC, provocant un escenari de combustió indesitjable per al motor. Al seu torn, això resulta en ineficiències, evitant que el motor assoleixi els límits de velocitat més elevats especificats.
Per tant, per tal de corregir el temps de disparament de l’encesa, hem d’avançar lleugerament el tret de la bugia comandant un disparador lleugerament avançat per al circuit CDI, i per velocitats més lentes, simplement s’ha d’invertir i cal disparar preferiblement el tret permetent una eficiència òptima per al motor del vehicle.
Discutirem tots aquests paràmetres amb molta elaboració en algun altre article, de moment voldríem analitzar el mètode que ens permetria realitzar ajustos manuals de la sincronització de l’encesa d’encesa per avançar, retardar o treballar normalment segons la velocitat de la moto.
És possible que el temps de recollida no sigui suficientment fiable
A partir de la discussió anterior, podem concloure que el disparador de la bobina de recollida no es converteix en fiable només per a les motocicletes d'alta velocitat i que alguns mitjans per avançar en el senyal de recollida són imprescindibles.
Normalment, això es fa mitjançant microcontroladors, he intentat aconseguir el mateix mitjançant components normals, pel que sembla és un disseny lògicament factible, tot i que només una prova pràctica pot confirmar la seva usabilitat.

Disseny d'un processador electrònic CDI Advance Retard
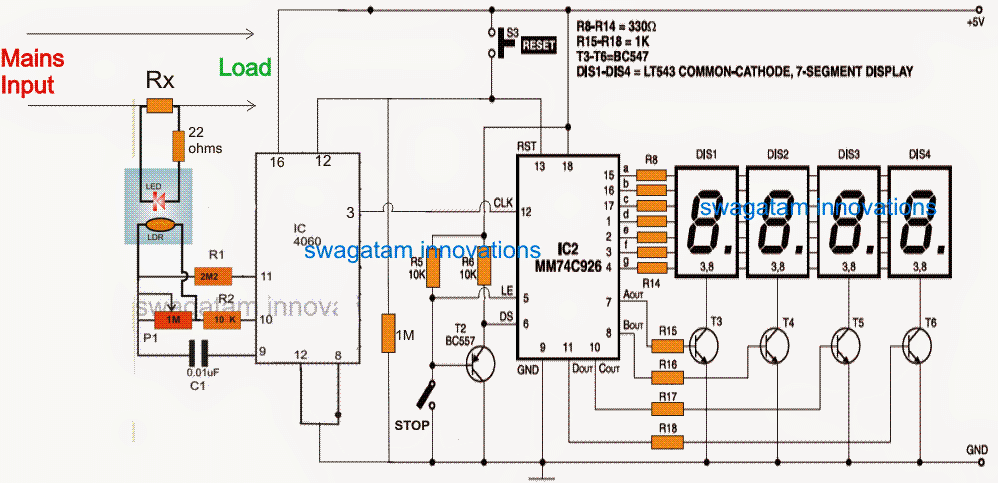
Referint-nos al disseny anterior del circuit de temporitzador avançat i retardador d'espurna CDI proposat, podem veure un circuit ordinari IC 555 i un IC 4017 que estan equipats en un estàndard ' Circuit de llum de caçador LED 'mode.
L'IC 555 està configurat com un astable que produeix i alimenta polsos de rellotge al pin # 14 de l'IC 4017, que al seu torn respon a aquests impulsos i produeix una lògica alta 'saltant' a través dels seus pinouts de sortida a partir del pin # 3 al pin # 11 i després torneu al pin número 3.
Es poden veure un parell de BJT NPN / PNP a la part esquerra del diagrama, que es col·loquen per restablir els dos circuits integrats en resposta als senyals rebuts de la bobina de recollida de motocicletes.
El senyal de la bobina de captació s’alimenta a la base del NPN, cosa que demana als CI que restableixin i reinicien les oscil·lacions, cada vegada que la bobina de captació detecta una revolució completada pel volant associat.
Optimització de la freqüència IC 555
Ara, la freqüència IC 555 s’ajusta de manera que en el moment en què la bobina de captació detecta una volta i restableix els CI, el 555 IC pot produir entre 9 i 10 polsos, cosa que permet al IC 4017 obtenir un màxim fins al seu pin # 11 o almenys fins al seu pinout # 9.
L'anterior es pot configurar per a revolucions corresponents a la velocitat de ralentí de la motocicleta.
Vol dir que durant les velocitats de ralentí, els senyals de la bobina de captació permetrien que les sortides 4017 viatgin per gairebé tots els pinouts fins que es restableixi al pin # 3.
Tot i així, ara intentem simular el que passaria a velocitats més altes.
Resposta a major velocitat del vehicle
A velocitats més altes, els senyals de captació produirien senyals més ràpids que la configuració normal, i això al seu torn impediria que l'IC 555 generés els 10 polsos estipulats, de manera que ara podria generar al voltant de 7 polsos o 6 polsos a donada la velocitat més alta del vehicle.
Al seu torn, això impediria que l'IC 4017 permetés que tota la seva sortida fos alta, en canvi ara només seria capaç de conduir fins al pin 6 o el pin 5, després de la qual cosa la captació obligaria a reiniciar l'IC.
Dividir el volant en 10 divisions avançades / endarrerides
A partir de la discussió anterior, podem simular una situació en què, a velocitat de ralentí, les sortides del 4017 IC divideixen la rotació del volant de recollida en 10 divisions, en les quals es pot considerar que els senyals inferiors de 3 o 4 corresponen als senyals que poden ser que es produeix just abans del senyal realitzador de la bobina de captació, de manera similar es podria simular que les lògiques de pinout alta al pin # 2,4,7 són els senyals que apareixen just després que el disparador real de la bobina de captura hagi passat.
Per tant, podem suposar que els senyals dels pinouts inferiors de l'IC 4017 estan 'avançant' en els senyals de captació reals.
A més, atès que el restabliment del pickup empeny l'IC 4017 al seu pin # 3, es pot suposar que aquest pinout correspon al disparador 'recomanat' normal del pickup ... mentre que els pinouts que segueixen el pin # 3, és a dir, es pot suposar que els pinouts2,4,7 són els senyals corresponents als senyals tardans o als senyals 'retardats', respecte als activadors de captació reals.
Com configurar el circuit
Per a això, primer hem de conèixer el temps que requereix el senyal de captació per generar cada impuls alternatiu.
Suposem que enregistreu que sigui al voltant de 100 mil·lisegons (un valor arbitrari), això implicaria que el 555 IC necessita produir impulsos al seu pin # 3 a un ritme de 100/9 = 11,11 ms.
Un cop establert això, podem suposar aproximadament que les sortides del 4017 produeixen una lògica elevada en totes les seves sortides, que gradualment es 'retrocediran' a mesura que els senyals de captació siguin cada cop més ràpids en resposta a la velocitat del vehicle.
Això induiria una lògica 'alta' retrocedint a través dels pinouts inferiors de l'IC 4017, per tant, a velocitats més altes, el pilot tindria l'opció de recórrer manualment als conjunts inferiors de pins per activar la bobina CDI, tal com es mostra al diagrama (vegeu opcions del commutador selector).
A la figura podem veure un commutador selector que es pot utilitzar per seleccionar els activadors de pinout des del IC 4017 IC per activar la bobina CDI.
Tal com s’ha explicat anteriorment, el conjunt inferior de lògiques de pinout retrocedint una vegada seleccionat, permetria un desencadenament avançat de la bobina CDI i, per tant, permetria al pilot aconseguir un tret automàtic d’ajustament automàtic de la bobina CDI, tot i que només s’ha de seleccionar el vehicle circula molt per sobre de la velocitat normal recomanada.
De la mateixa manera, si el pilot contempla una velocitat inferior per al vehicle, pot canviar l'interruptor per seleccionar l'opció de sincronització 'retardada', disponible a través dels pinouts que hi ha just després del pin # 3 de l'IC 4017.
Durant les velocitats normals recomanades, el motorista pot optar pel pin número 3 com a sortida de sortida del CDI, que permetria al vehicle gaudir d’una conducció eficient a les velocitats normals donades.
La teoria de sincronització avançada / retardada anterior es va inspirar en l'explicació expressada al següent vídeo:
A continuació es mostra l’enllaç de vídeo original que es pot veure a Youtube:
Com automatitzar el concepte anterior
A la secció següent aprenem el mètode per actualitzar el concepte anterior a una versió automàtica mitjançant un tacòmetre i un circuit opamp. Mike va sol·licitar la idea i la va dissenyar Abu-Hafss.
Especificacions tècniques
Salutacions!
Coses interessants aquí, actualment estic traçant traços en CAD i m'agradaria gravar-ho en alguns PCB, però prefereixo deixar la selecció de l'estàndard avançat o el retard a l'electrònica ...
Sóc una mica nou en això, però sento que tinc una bona comprensió dels conceptes en joc ...
la meva pregunta és, hi ha algun article que tingueu sobre l’automatització de la selecció avançada basada en el RPM del motor? oh i una llista de parts dels diferents components seria espectacular ???
Gràcies, Mike
El disseny, d’Abu-Hafss
Hola Swagatam
Referint-vos al vostre article sobre avançar, retardar la ignició CDI spark per millorar l'eficiència de les motocicletes a alta velocitat , Voldria comentar que encara no he trobat cap situació en què es requereix RETARDACIÓ (o més exactament RETARD) de disparar les espurnes. Com heu esmentat, la majoria de les bicicletes (bicicletes de carreres) no funcionen a RPM elevades (normalment superiors a 10.000 RPM), de manera que es requereix un tret avançat d’espurna. Tenia gairebé la mateixa idea al cap, però no podia fer proves físiques.
A continuació es mostra la meva proposta d'afegir al vostre circuit:
Per automatitzar el canvi de guspira de foc entre NORMAL i ADVANCE, a circuit del tacòmetre es pot utilitzar amb alguns components més. S'elimina el voltímetre del circuit del tacòmetre i s'alimenta la sortida al pin núm. 2 de l'IC LM741 que s'utilitza com a comparador. Al voltatge número 3 s’assigna una tensió de referència de 10V. El circuit del tacòmetre està dissenyat per donar una sortida de 1 V contra 1000 RPM, de manera que 10 V es refereixen a 10.000 RPM. Quan la RPM és superior a 10.000, el pin número 2 té més de 10 V i, per tant, la sortida de 741 es redueix (zero).
Aquesta sortida està connectada a la base de T2, per tant, els interruptors de baixa sortida de T2. Si la RPM és inferior a 10.000, la sortida augmenta i, per tant, T2 s'apaga. Al mateix temps, T4, que es configura com a inversor de senyal, inverteix la sortida a baixa i el mateix està connectat a la base de T3, per tant, T3 s’encén.
Salutacions
Abu-Hafss

Anterior: Com obtenir energia gratuïta d’un pèndol Següent: Fer un circuit regulador de voltatge de 3,3 V, 5 V amb díodes i transistors