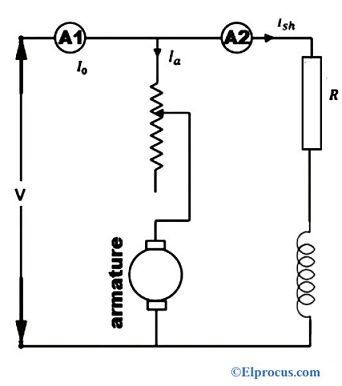
El circuit de control de velocitat de trepant variable proposat manté una velocitat constant (ajustable) sobre el motor de la màquina de trepar, independentment de la càrrega.
Una de les eines elèctriques més utilitzades és la màquina de trepar. Malgrat els seus innombrables avantatges, el trepant té un revés important: la velocitat alta constant per a moltes aplicacions.
Fins i tot quan hi ha configuracions de doble velocitat, el límit inferior cobreix al voltant de 300-750 rpm, cosa que encara és molt ràpida per a treballs subtils com perforar maçoneria o utilitzar talladores de mosca sobre xapa.
La nostra versió del controlador de velocitat al trepant permet variar les velocitats del 0 al 75% de la velocitat màxima. A més, també permet un funcionament a velocitat normal sense separar el controlador de la broca.
Fins i tot quan hi ha canvis de càrrega, el controlador està equipat amb una compensació integrada per preservar les velocitats considerablement uniformes.
Com funciona
La característica típica d’un motor elèctric és que produeix una tensió inversa que s’oposa a l’alimentació quan funciona.
Aquesta condició s’anomena CEM posterior. Es troba que la tensió oposada és proporcional a la velocitat del motor elèctric. El controlador de velocitat de perforació SCR va utilitzar aquest efecte per proporcionar una quantitat definida de compensació velocitat contra càrrega.
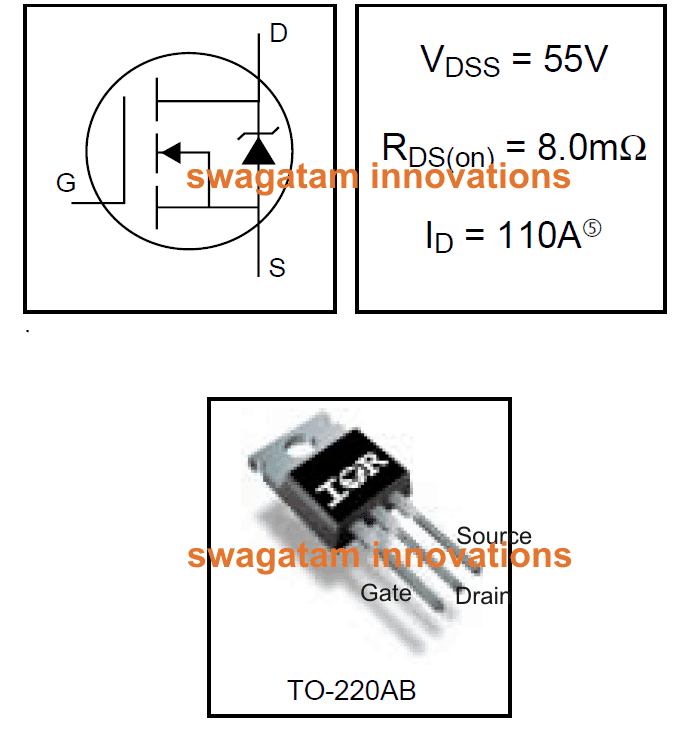
Aquest controlador desplega un fitxer Rectificador controlat de silici (SCR) per alimentar la potència de mitja ona al motor de la broca. Els fonaments de la conductivitat d'un SCR són:

- L’ànode (terminal A) té una càrrega positiva respecte al càtode (terminal K).
- Quan la porta (terminal G) desenvolupa almenys 0,6 V positiva respecte al càtode.
- Al voltant de 10 mA de corrent flueix cap al terminal de la porta.
El moment en què SCR s'encén en cada mig cicle positiu es pot regular eficientment controlant el nivell de forma d'ona de tensió a la porta. En conclusió, podem controlar perfectament la quantitat de potència subministrada a la broca.
Les resistències R1 i R2 i el potenciòmetre RV1 es converteixen en divisor de tensió que proporciona un voltatge de mitja ona de valor ajustable a la porta del SCR. Si el motor és immòbil, el càtode del SCR estarà a 0 V i s’encendrà gairebé completament. A mesura que augmenta la velocitat del trepant, es forma una tensió a través del trepant.
Aquest potencial addicional redueix els voltatges efectius del càtode de porta. Així, quan el motor s’accelera, la potència subministrada disminueix fins que el motor es torna estable a una velocitat regulada per la configuració de RV1.
Suposem que es col·loca una càrrega al trepant. Això tendirà a desaccelerar la broca i, simultàniament, fa caure el voltatge a través de la broca. Llavors, es subministra més potència al motor a causa del temps de cocció avançat automàticament del SCR.
Per tant, la velocitat de la broca es manté un cop configurada independentment de la càrrega. El díode D2 funciona per reduir a la meitat la potència dissipada a R1, R2 i RV1 mitjançant la restricció del corrent a través d’ells només a semicicles positius.
El díode D1 protegeix la porta SCR de la tensió inversa extrema.
SW1 redueix fàcilment el SCR a la velocitat màxima. Com a resultat, RV1 no funciona i tot el subministrament de xarxa s’aplica a la broca.
Construcció
El més important, és crucial saber que el circuit de control de velocitat de perforació està connectat directament a la xarxa sense necessitat d’un transformador aïllant.
Per tant, s’han de prendre mesures de precaució durant el muntatge perquè no es produeixin lesions greus o mortals.
No es requereix l’ús d’una tira d’etiquetes o d’un PCB perquè només s’utilitzen un grapat de components electrònics. Només són necessàries dues juntes 'a l'aire' que han d'estar aïllades de manera segura per evitar possibles curtcircuits.
Per a aquest projecte s’utilitza un tipus SCR de muntatge de perns. Aquest component es col·loca mitjançant la punta de soldadura que s’acompanya i es solda a la punta central de l’interruptor.
No hi ha dissipadors de calor necessaris per a càrregues de fins a 3 A. Si teniu un SCR amb paquet de plàstic, podeu perforar un forat a través de la llengüeta de l’interruptor i cargolar-lo.
No obstant això, es recomana col·locar una peça d'alumini, amb una dimensió de 25 mm x 15 mm, entre el SCR i la rosca del commutador per funcionar com a dissipador de calor.
És fonamental recordar fer connexions a terra per a tots els components externs perquè la unitat funciona a 240 Vac. Per al cas, hem utilitzat un compartiment de plàstic amb una tapa metàl·lica.
A més, s’utilitza una mordassa per cable fixada amb un cargol metàl·lic pel costat de la caixa de plàstic.
Recordeu preparar la connexió de terra per a aquest cargol, la tapa i el terminal de terra de la presa de sortida.
És essencial utilitzar només cablejat continu ja que els cables de terra van d’un punt de terra a un altre sense enllaços intermedis. Està bé soldar dos cables de terra a una mànega de terra, però no subjecteu mai dos cables sota un sol cargol.
La coberta d'alumini de la caixa UB3 no és robusta per a aquesta aplicació, especialment quan es talla el forat de la presa de sortida.
Per tant, assegureu-vos de fabricar una tapa nova a partir d'un material d'alumini d'acer de calibre 18 o de calibre 16.
Com a mesura de seguretat addicional, es recomana utilitzar una petita quantitat de cola, laca o fins i tot esmalt d'ungles a les ranures del cargol que es fixaran a l'interior de la unitat. Això garanteix un muntatge segur.
És possible que noteu en alguns SCR que el corrent d’activació proporcionat per R1 i R2 és inadequat. Per superar-ho, només cal afegir una resistència addicional de 10 k en paral·lel a cada resistència.
Com utilitzar
En primer lloc, connecteu el circuit del controlador de velocitat del trepant a la xarxa elèctrica i el trepant al controlador.
A continuació, seleccioneu la velocitat que desitgeu: velocitat completa o variable. És possible que observeu que no hi ha cap commutador ON o OFF perquè la funció de commutació la proporciona el mateix interruptor del trepant.
A tota velocitat, el trepant funciona normalment i el control de velocitat del controlador no té cap efecte.
Si se selecciona velocitat variable, el control regularà la velocitat entre el 0 i el 75% de la velocitat màxima. És possible que hi hagi zones mortes a baixa velocitat i extrems d'alta velocitat del control.
Això és molt normal i passa per les propietats del trepant i les toleràncies dels components al controlador.
A velocitats extremadament baixes, és possible que observeu les sacsejades de la broca sense càrrega. Però en el moment que s’introdueix una càrrega, la sacsejada es redueix i finalment desapareix.
Mentre s’utilitzi la broca a velocitat inferior a la màxima, l’efecte de refrigeració del motor es reduirà significativament.
Això passa perquè el ventilador de refrigeració s’uneix a l’eix de la armadura i també gira més lentament. Per tant, la broca s’escalfarà quan s’utilitzi a velocitats baixes, per la qual cosa és important no fer servir la broca en aquest mode durant un llarg període.
LLISTA DE PECES
R1, R2 = Resistència 10k 1W 5%
RV1 = Potenciòmetre 2,5k Lin
D1, D2 = Diodes 1N4004
SCR1 = SCR 2N4443 o BT151 (8A / 10A, 400V)
SW1 = quadre de commutació
3-core flex i endoll
Pinça de cable
Presa de corrent de 3 pins
És possible que alguns SCR tinguin un corrent d’activació superior al valor normal, cosa que pot inhibir el funcionament de les unitats. En aquests casos, podeu afegir SCR en paral·lel, juntament amb les dues resistències de 10 k amb una resistència de 10 k addicional per assegurar-vos que hi hagi suficient corrent disponible per al desencadenament de la porta SCR.
Utilització del control de fase Triac
Gairebé tots els controladors de velocitat de perforació estan afectats per diversos aspectes negatius. Per exemple, una estabilitat de velocitat inadequada, una tremolor excessiva a velocitats reduïdes i una gran dissipació de potència de la resistència de la sèrie emprada per detectar el corrent del motor.
El circuit explicat en aquest article no inclou res d’aquests desavantatges i, a més, és increïblement senzill. L'entrada de corrent de corrent es rectifica per D1 i es redueix per R1.

El corrent consumit per T1 podria governar-se a través de P1, per tant manipulant també la tensió de corrent continu que es presenta a través de C2, per tant a la base T2. T2 està connectat com a seguidor de l’emissor i la tensió que es desenvolupa al càtode de D3 és d’uns 5,5 V per sota de la tensió base T2.
Suposant que el motor està canviant però que el triac està apagat, el tornar e.m.f. creada a través del motor es desenvoluparà al pin T1 del triac.
Mentre aquesta tensió sigui superior a la tensió del càtode D3, el triac romandrà apagat, però, a mesura que el motor desacceleri, aquest voltatge caurà i el triac s’activarà.
En el cas que la càrrega del motor augmenti, com a conseqüència de fer que el motor de la broca es desacceleri, l’e.m.f posterior. caurà més ràpidament i el tríac es desencadenarà més ràpidament, com a resultat, farà que la còpia de seguretat del motor augmenti la velocitat.
Com que el triac només es podria activar en semicicles positius de la forma d'ona de CA, el controlador de velocitat de la perforació no ajustarà la velocitat del motor contínuament de zero a la velocitat d'acceleració, i s'incorpora S1 de treball a tota velocitat estàndard, que activa el trlac completament.
No obstant això, el circuit mostra uns atributs de control de velocitat molt bons en el rang de velocitat reduït crucial. L1 i C1 lliuren r.f. supressió d’interferències causada per la picada de la fase tríaca.
L1 podria ser un taulell fàcilment disponible r.f. sufocador supressor de diverses inductàncies de microhenries.
La potència actual de L1 ha d’estar entre dos i quatre amperes, respecte a la potència actual del motor de perforació. Gairebé qualsevol 600V 6 A triac funcionarà molt bé al circuit.
Anterior: Circuit de regulador de llum de botó de pressió Següent: s’expliquen 4 circuits d’amplificadors PWM eficients