L’article que es presenta aquí explica un circuit de control de velocitat del motor de corrent altern de circuit tancat molt senzill que es pot utilitzar per controlar les velocitats del motor de corrent altern monofàsica.
El circuit és molt barat i utilitza components electrònics normals per a les implementacions necessàries. La característica principal del circuit és que és un tipus de bucle tancat, és a dir, la velocitat o el parell del motor mai no es poden veure afectats per la càrrega o la velocitat del motor en aquest circuit, al contrari el parell és indirectament proporcional a la magnitud de la velocitat.
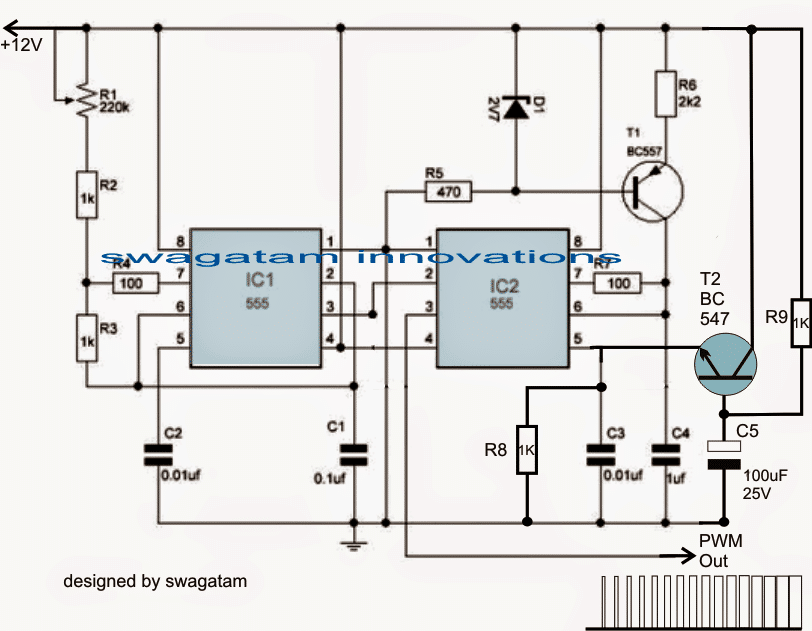
Funcionament del circuit:
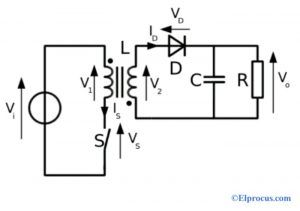
En referir-se al diagrama de circuits del controlador de motor de corrent altern de circuit tancat monofàsic proposat, es poden entendre les operacions implicades a través dels punts següents:
Per als semicicles positius de l'entrada CA, el condensador C2 es carrega a través de la resistència R1 i el díode D1.

La càrrega de C2 persisteix fins que el voltatge d’aquest condensador esdevingui equivalent al voltatge zener simulant la configuració.
El circuit connectat al voltant del transistor T1 simula efectivament el funcionament d’un díode zener.
La inclusió del pot P1 permet ajustar la tensió d’aquest “díode zener”. Precisament parlant, la tensió desenvolupada a través de T1 està literalment determinada per la relació entre les resistències R3 i R2 + P1.
La tensió a través de la resistència R4 es manté sempre igual a 0,6 volts, igual a la tensió de conducció requerida de la tensió de l’emissor base de T1.
Per tant, significa que el voltatge zener explicat anteriorment hauria de ser igual al valor que es pot adquirir resolent l'expressió:
(P1 + R2 + R3 / R3) × 0,6
Llista de peces per al circuit controlador de velocitat del motor de corrent altern tancat anteriorment
- R1 = 39.000,
- R2 = 12.000,
- R3 = 22.000,
- R4 = 68.000,
- P1 = 220.000,
- Tots els díodes = 1N4007,
- C1 = 0,1 / 400V,
- C2 = 100uF / 35V,
- T1 = BC547B,
- SCR = C106
- L1 = 30 voltes de filferro SWG 25 sobre una barra de ferrita de 3 mm o 40 uH / 5 watts
Com es col·loca la càrrega per un motiu especial
Una investigació acurada revela que el motor o la càrrega no s’introdueixen a la posició habitual, sinó que es connecten just després del SCR, al seu càtode.
Això fa que s'introdueixi una característica interessant amb aquest circuit.
La posició especial anterior del motor dins del circuit fa que el temps de cocció del SCR depengui de la diferència de potencial entre la CEM posterior del motor i la 'tensió zener' del circuit.
Això significa simplement que, com més es carrega el motor, més ràpid es dispara el SCR.
El procediment simula un funcionament de bucle tancat on la retroalimentació rebuda en forma de CEM posterior generada pel propi motor.
No obstant això, el circuit està associat amb un lleu inconvenient. L’adopció d’un SCR significa que el circuit pot gestionar només 180 graus de control de fase i que el motor no es pot controlar en tot el rang de velocitat, sinó només en un 50%.
Un altre desavantatge associat a la naturalesa econòmica del circuit és que el motor tendeix a produir singlot a velocitats més baixes, però, a mesura que augmenta la velocitat, aquest problema desapareix completament.
La funció de L1 i C1
S'inclouen L1 i C1 per comprovar les RF d'alta freqüència generades a causa de la ràpida picada de fase per part del SCR.
Cal dir menys que el dispositiu (SCR) s’ha de muntar en un dissipador de calor adequat per obtenir uns resultats òptims.
Tornar circuit de controlador de velocitat de perforació EMF
Aquest circuit s'utilitza principalment per controlar la velocitat constant de motors de bobina de sèries més petites, tal com es troba en diversos trepants manuals elèctrics, etc. El parell i la velocitat es controlen mitjançant un potenciòmetre P1. Aquesta configuració de potenciòmetre especifica fins a quin punt es podria activar el triac.

Quan la velocitat del motor cau just per sota del valor predefinit (amb la càrrega connectada), llavors la CEM posterior del motor disminueix. Com a resultat, la tensió al voltant de R1, P1 i C5 augmenta de manera que el triac s’activa abans i la velocitat del motor tendeix a augmentar. D'aquesta manera s'aconsegueix una certa proporció d'estabilitat de velocitat.
Anterior: Com generar electricitat a partir d’aigua de mar: 2 mètodes senzills Següent: Circuit de commutació de control remot per a telèfons mòbils basats en GSM