El sistema de posicionament global o GPS és una xarxa de satèl·lits en òrbita que s’utilitza per localitzar posicions de qualsevol lloc de l’espai cap a la terra. Aquest tipus de tecnologia es pot utilitzar en diverses àrees, com ara l'ús comercial, militar i els serveis civils de tot el món. El GPS es pot utilitzar per a aquests propòsits: sincronització perfecta, trilateració, posicionament de satèl·lits i connexió d'errors. Aquest sistema es pot utilitzar universalment durant 24 hores. Abans de discutir l'assistent de viatges basat en GPS per a persones invidents, informeu-nos del concepte de Tecnologia GPS .

Sistema de Posicionament Global
Introducció al sistema de posicionament global (GPS)
El Sistema de Posicionament Global consta de tres segments: segment d'espai (SS), segment de control (CS) i un segment d'usuari (EUA). Els segments de control i d’espai són desenvolupats, operats i mantinguts per la força aèria nord-americana. El segment d’usuaris inclou tant usuaris civils com militars i el seu equip GPS.

Sistema GPS
Segment d’espai
Aquest segment consta de 24 satèl·lits, dels quals 21 són vehicles espacials de navegació i 3 són recanvis actius que orbiten a una altitud de 11000 milles nàutiques. Aquests satèl·lits són previsibles i estables a causa de la seva gran altitud. Aquest sistema consta de sis plans orbitals inclinats a 55 graus i igualment situats a uns 60 graus al pla equatorial.
Segment de control
Comprèn una estació de control mestra, una estació de control de motor alternativa, sis estacions de monitorització i quatre antenes de terra. Aquestes estacions de control es situen a tot el món per mesurar el senyal dels vehicles espacials que s’incorporen a un model orbital de cada satèl·lit. Les antenes de terra dedicades s’utilitzen per emetre senyals als satèl·lits.
Segment d’usuari
Aquest sistema consta de receptors que es poden instal·lar a mà o en avions, vaixells, submarins, cotxes i camions. Els receptors GPS poden descodificar, detectar i processar els senyals als satèl·lits. Aquests senyals es poden canviar en posició, temps i velocitat. Aquest segment es pot utilitzar en diferents aplicacions, com ara el posicionament per satèl·lit, l'enviament, l'exèrcit, el topografia i el seguiment.
Això sobre la tecnologia GPS i com a aplicació d’aquest GPS aquí oferim un projecte per guiar les persones cegues com a sistema de navegació per veu.
Sistema de navegació per veu basat en GPS (sistema de posicionament global) per a persones cegues
El terme ceguesa fa referència a les persones que no tenen visió alguna o a les que tenen menys visió. La majoria de les persones cegues recolzen els gossos guia per caminar. Estem explicant el sistema de navegació per veu i GPS per a persones invidents. En aquest cas, les persones invidents emeten les ordres i després reben la resposta mitjançant senyals d'àudio. El receptor GPS s’utilitza per rebre contínuament els valors de la latitud i la longitud. Amb l’avenç tecnològic, l’ús del reconeixement de veu és més fàcil enviar ordres sobre les indicacions a les persones invidents. Com a aplicació d’aquesta tecnologia GPS, aquí els sistemes d’alerta de veu basats en GPS per a persones cegues s’expliquen pràcticament en paràgrafs posteriors.

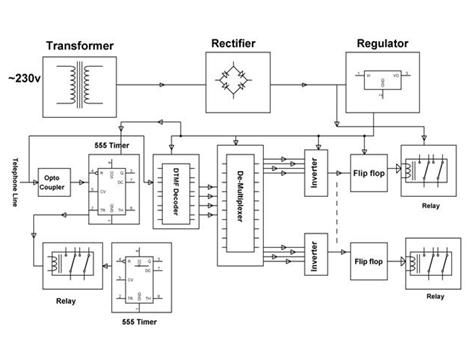
Diagrama de blocs del sistema de navegació per veu per a persones cegues
Components de maquinari i programari utilitzats
Aquest sistema de navegació cec està construït amb els components principals com microcontrolador, receptor GPS, mòdul de reconeixement de veu, unitat de reproducció de veu, altaveu, sensor d’ultrasons i Unitat de subministrament d'energia . Vegem amb detall tots aquests components.
Microcontrolador
Aquest controlador és del Processador ARM LPC2148, que combina el microcontrolador amb memòria flash d'alta velocitat que oscil·la entre els 32 i els 512 KB. Compta amb memòria de programa flash en xip i RAM estàtica en xip. Té 10 bits Convertidors A a D. i suports per a la transferència USB 2.0 a tota velocitat. A causa del baix cost, el baix consum d'energia i la facilitat de maneig, aquest microcontrolador és fiable per a aquest projecte.
Receptor GPS
El sistema de posicionament global o receptor GPS utilitzat en aquest projecte és el GR87, que fa ús dels senyals de transmissió provinents de satèl·lits GPS. Proporciona una ubicació tridimensional, com ara valors de longitud, latitud i altitud de totes les posicions d’aquest món en totes les condicions meteorològiques. Les principals característiques d’aquest receptor són el baix consum d’energia, 1 MB de SRAM al xip, el temps de recuperació de 0,1 segons i el maquinari de mitigació de diversos camins.
Mòdul de reconeixement de veu
Aquest mòdul detecta les paraules que l'usuari parla mitjançant un micròfon. Aquesta unitat realitzarà l'anàlisi de la veu després de prendre el senyal d'àudio d'entrada. Aquest sistema consta de dues fases com a fase d’entrenament i l’altra és una fase de reconeixement. Durant la fase d’entrenament, l’altaveu ha de donar senyals de veu per entrenar el sistema i, en una altra fase, l’orador ha de donar ordres de veu que es combinen amb els senyals emmagatzemats mentre s’emmagatzemen durant la fase d’entrenament. Aquest projecte utilitza l'IC HM2007 com a mòdul de reconeixement.
Unitat de reproducció de veu
És un AP89085 IC d'alt rendiment fabricat amb un processador CMOS amb una EPROM de 2 MB incrustada. És un disc de so i respon a IC que pot emmagatzemar el missatge fins a 85 segons. Aquest so enregistrat es conserva fins i tot després de retirar la font d'alimentació i aquest so reproduït és d'alta qualitat amb el nivell de soroll mínim.
Sensor d'ultrasons
Aquest sensor s'utilitza per detectar els obstacles en el camí per a les persones cegues en aquest projecte. Aquest sensor transmet una ràfega d'ultrasons i, corresponentment, dóna un impuls de sortida en funció del temps necessari perquè l'eco de ràfega torni a la sensor d'ultrasons . D'aquesta manera depèn de l'amplada del pols d'eco, la distància objectiu es detecta i mesura fàcilment.
Unitat de ponents
L’altaveu s’utilitza per guiar les persones amb discapacitat visual a navegar-hi segons els senyals o el so enregistrat de la unitat de reproducció de veu.
MÀXIM 232
Per proporcionar la comunicació entre el receptor GPS i el microcontrolador, s’utilitza MAX 232. Es tracta d’una unitat d’interconnexió de dades binàries en sèrie estàndard entre el terminal de dades i la unitat de comunicació de dades. Aquesta unitat converteix els senyals de nivell RS232 del receptor GPS a senyals de nivell TTL del microcontrolador.
Components de programari
Eines de programari com C incrustat, ID Keil , i Uc-Flash s’utilitzen en aquest projecte per programar el microcontrolador.
Funcionament del sistema de navegació per veu
Tot el circuit s’alimenta amb una font d’alimentació de CC regulada, tal com es mostra al diagrama de blocs. El receptor GPS utilitzat en aquest projecte és capaç de rebre senyals de 65 satèl·lits GPS (sistema de posicionament global). Aquests senyals rebuts es transfereixen a informació precisa de posició i temporització que es pot llegir des del port RS232 d’aquest receptor. Aquestes dades de longitud, latitud, altitud i sincronització s’envien a la unitat de microcontroladors MAX232 IC . Aquests valors es processen contínuament al microcontrolador.

Funcionament del sistema de navegació per veu
El mòdul de reconeixement de veu reconeix les paraules pronunciades per l'usuari i, corresponentment, envia aquests senyals al microcontrolador. El microcontrolador compara els valors del lloc parlat (longitud, latitud i altitud) amb els senyals del receptor GPS. Després d'aquesta comparació, el microcontrolador condueix la unitat de reproducció de veu per proporcionar navegació per veu a l'usuari. Les veus predefinides s’emmagatzemen en aquest mòdul com a comandes de navegació cap a les persones invidents. Podem emmagatzemar els valors de destinació de cada veu de comandament parlat al microcontrolador per reconèixer les destinacions. El sensor d’ultrasons detecta l’obstacle que hi ha en el camí cap a la destinació, de manera que el microcontrolador l’obté i alerta les persones amb discapacitat visual.
Es tracta del sistema de posicionament global o sistema de navegació per veu basat en GPS per a persones invidents. Espero que tingueu una millor comprensió del GPS amb aquesta pràctica aplicació. A més, qualsevol ajuda per implementar aquest projecte o qualsevol altre projectes electrònics , especialment per connectar el receptor GPS i el seu procés de configuració, podeu deixar els vostres comentaris a continuació.