Aquest versàtil controlador de motor sense escombretes (BLDC) IC es caracteritza per controlar qualsevol motor BLDC trifàsic equipat amb sensor d’efecte corrent i alta tensió desitjat, amb una precisió i seguretat extremes. Aprenem els detalls en profunditat.

Ús de l’IC MC33035
L'heroi del circuit és el controlador d'un sol xip MC33035, que és un mòdul IC de segona generació d'alt rendiment, que inclou totes les funcions actives necessàries que es poden requerir per executar el BLDC més intens, d'alta tensió, trifàsic o 4 fases. motors amb configuració de bucle obert o tancat.

El CI està equipat amb un descodificador de posició del rotor per permetre una seqüenciació de commutació precisa, una referència compensada per la temperatura per facilitar el voltatge correcte del sensor, un oscil·lador de dents de serra de freqüència programable, tres fases de controlador de col·lector obert integrat obert i tres tòtems de gran corrent tipus controladors de banda baixa, dissenyats específicament per operar una etapa de controlador de motor mosfet d'alta potència de pont H trifàsic.
El xip també es reforça internament amb funcions de protecció de gamma alta i etapes de control infal·libles, com ara bloqueig de baixa tensió, limitació de corrent cicle per cicle mitjançant una opció d’aturada de retard ajustable, apagat intern a alta temperatura IC i un disseny exclusiu pinout de sortida de falles que pot ser interfície amb una MCU per a un processament avançat preferit i retroalimentació.
Les funcions típiques que es poden executar amb aquest CI són: control de velocitat de bucle obert, control de direcció inversa cap endavant, “activació de funcionament”, una característica de fre dinàmic d’emergència.
L'IC està dissenyat per funcionar amb sensors de motors que tinguin fases de 60 a 300 graus o de 120 a 240 graus, com a avantatge que l'IC també pot utilitzar per controlar els motors raspallats tradicionals.
Com funciona l'IC
El MC33035 es troba entre diversos controladors de motor sense escombretes monolítics de corrent continu creats per Motorola .
Està format per gairebé les capacitats necessàries per instaurar un sistema de control de motor de tres o quatre fases de bucle obert complet i complet.
A més, el controlador es pot aconseguir per controlar motors de raspall continu. Dissenyat amb tecnologia analògica bipolar, presenta un nivell superior d’eficiència i durabilitat en un entorn industrial despietat.
L’MC33035 porta un descodificador de posició del rotor per a una seqüenciació precisa de commutació, una referència reemborsada a l’entorn competent per subministrar una potència del sensor, un oscil·lador de dents de serra programable en freqüència, un amplificador d’errors totalment accessible, un comparador de modulador d’amplitud d’impulsos, 3 sortides superiors de col·lector obert i 3 les sortides del control inferior de tòtem de corrent alt són adequades per a MOSFET de potència operativa.
L’MC33035 incorpora funcions de protecció que inclouen bloqueig de baixa tensió, limitació de corrent cicle per cicle amb un mode d’aturada retardada amb retard de temps seleccionable, apagat tèrmic integrat, juntament amb una sortida d’error exclusiva que serà convenientment interfaçada amb un controlador de microprocessador.
Els atributs de control de motor estàndard incorporen control de velocitat de bucle obert, rotació cap endavant o inversa, habilitació de funcionament i frenada dinàmica. A més, el MC33035 té un pin de selecció de 60 ° / 120 ° que configura el descodificador de situació del rotor per a entrades de fase elèctriques del sensor de 60 ° o 120 °.

Funcions PIN OUT:
Pin1, 2, 24 (Bt, At, Ct) = Aquestes són les tres sortides de la unitat superior de l'IC especificades per operar els dispositius d'alimentació configurats externament, com ara els BJT. Aquests pinouts es configuren internament com a mode de col·lector obert.
Pin # 3 (Fwd, Rev) = Aquest pinout està pensat per utilitzar-se per controlar la direcció de la rotació del motor.
Pin # 4, 5, 6 (Sa, Sb, Sc) = Es tracta de 3 sortides de sensor de l'IC assignades per comandar la seqüència de control del motor.
Pin núm. 7 (habilitat de sortida) = Aquest pin de l'IC s'assigna per permetre el funcionament del motor sempre que es mantingui una lògica alta aquí, mentre que una lògica baixa és per permetre un desplaçament del motor.
Pin # 8 (sortida de referència) = Aquest pin està habilitat amb un corrent de subministrament per carregar el condensador de sincronització de l'oscil·lador Ct, així com proporcionar un nivell de referència per a l'amplificador d'errors. També es pot utilitzar per subministrar energia als circuits integrats del sensor d’efecte Hall del motor.
Pin # 9 (entrada sense inversió de sentit actual) : La sortida de senyal de 100 mV es pot aconseguir des d'aquest pinout amb referència al pin # 15 i s'utilitza per cancel·lar la conducció de l'interruptor de sortida durant un cicle d'oscil·lador especificat. Aquest pinout normalment enllaça amb la part superior de la resistència de detecció de corrent.
Pin núm. 10 (oscil·lador) : Aquest pinout determina la freqüència de l'oscil·lador de l'IC amb l'ajut de la xarxa RC Rt i Ct.
Pin núm. 11 (entrada d'amplada d'error sense inversió) : Aquest pinout s'utilitza amb el potenciòmetre de control de velocitat.
Pin núm. 12 (error d'ampliació de la inversió de l'entrada) : Aquest pin està connectat internament amb la sortida d'amplificador d'error esmentada anteriorment per habilitar les aplicacions de bucle obert .
Pin # 13 (sortida de l'amperador d'error / entrada PWM) : La funció d'aquest pinout és proporcionar compensació durant les aplicacions de bucle tancat.
Pin núm. 14 (sortida de fallada) : Aquesta sortida de l'indicador d'error es pot convertir en una lògica activa baixa durant algunes condicions crítiques, com ara: Codi d'entrada no vàlid per al sensor, Habilita el pinout alimentat amb una lògica zero, El pinout d'entrada de sentit actual és superior a 100mV (@ pin9 amb referència al pin15) , activació del bloqueig de baixa tensió o situació d’aturada tèrmica).
Pin # 15 (entrada inversa de sentit actual) : Aquest pin està configurat per proporcionar el nivell de referència per al llindar intern de 100 mV i es pot veure connectat amb la resistència de detecció de corrent lateral inferior.
Pin núm. 16 (GND) : Aquest és el pin de terra de l'IC i està dissenyat per proporcionar el senyal de terra al circuit de control i s'ha de tornar a fer referència a la font d'alimentació a terra.
Pin # 17: (Vcc) : Aquest és el pin de subministrament positiu especificat per proporcionar la tensió positiva al circuit de control de l'IC. El rang mínim de funcionament d’aquest pin és de 10 V i el màxim a 30 V.
Pin # 18 (Vc) : Aquest pinout estableix l'estat alt (Voh) per a les sortides de disc inferior mitjançant la potència atribuïda a aquest pin. L’escenari funciona amb un rang de 10 a 30V.
Pin # 19, 20, 21 (Cb, Bb, Ab) : Aquests tres pinouts estan disposats internament en forma de sortides de tòtem i s’assignen per conduir els dispositius de potència de sortida de la unitat inferior.
Pin # 22 (selecció de desplaçament de fase 60 D, 120D) : L'estat atribuït a aquest pinout configura el funcionament del circuit de control amb els sensors d'efecte Hall per a entrades d'angle de fase de 60 graus (lògica alta) o 120 graus (lògica baixa).
Pin núm. 23 (fre) : Una lògica baixa en aquest pinout permetrà que el motor BLDC funcioni sense problemes mentre que una lògica alta aturarà instantàniament el funcionament del motor mitjançant una ràpida desacceleració.
DESCRIPCIÓ FUNCIONAL
A la figura anterior es mostra un diagrama de blocs intern representatiu. Un discurs sobre els beneficis i el funcionament de cadascun dels blocs centrals que s’enumeren a continuació.
Descodificador de posició del rotor
Un descodificador de posició del rotor interior mesura les 3 entrades del sensor (pins 4, 5, 6) per obtenir la seqüenciació correcta dels pinouts de la unitat superior i inferior. Les entrades del sensor es fabriquen per connectar-se directament amb commutadors d’efecte Hall tipus col·lector obert o acobladors ranurats opto.
Les resistències de tracció incorporades es classifiquen per reduir la quantitat necessària de parts externes. Les entrades són compatibles amb TTL, amb els llindars característics de 2,2 V.
La gamma d’ICs MC33035 està pensada per controlar motors trifàsics i funcionar amb 4 de les convencions més populars de fase de sensors. Una selecció de 60 ° / 120 ° (pin 22) es subministra convenientment i subministra l'MC33035 per configurar-la per si sola per regular motors que tinguin fase de sensor elèctric de 60 °, 120 °, 240 ° o 300 °.
Amb 3 entrades de sensor, descobrireu 8 possibles formacions de codi d’entrada, 6 de les quals són ubicacions legítimes de rotors.
Els altres dos codis estan obsolets ja que generalment són el resultat d’una connexió de sensor oberta o en curtcircuit.
Amb 6 codis d'entrada justificables, el descodificador pot tenir cura de la posició del rotor del motor dins d'un espectre de 60 graus elèctrics.
L'entrada Forward / Reverse (Pin 3) s'utilitza com a eina per modificar el curs del programa del motor invertint la tensió a través del bobinatge de l'estator.
Tan bon punt l’entrada modifica l’estat, de més alt a més baix mitjançant un codi de programa d’entrada de sensor assignat (per exemple, 100), es canvien les sortides facilitades de la unitat superior i base que fan servir el mateix estat alfa (AT a AB, BT a BB, CT a CB).
Bàsicament, la cadena canviable canvia de direcció i el motor inverteix la seqüència direccional. El control d’encès / apagat del motor s’aconsegueix mitjançant l’activació de sortida (pin 7).
Sempre que es desconnecta, un subministrament de corrent intern de 25 μA permet seqüenciar les sortides de la unitat principal i la base. Quan es posen a terra, les sortides de la unitat de la part superior s’apaguen i les unitats de base s’emmotllen fins a baix, evocant el motor cap a la costa i la sortida de la fallada a activar.
La frenada dinàmica del motor permet desenvolupar un excedent de marge de protecció en el dispositiu final. El sistema de frenada s’aconsegueix posant l’entrada de fre (pin 23) en un estat superior.
Això condueix a les sortides superiors de la unitat per apagar-se i les unitats inferiors a activar-se, provocant un curtcircuit de la CEM generada pel motor. L’entrada de fre té una consideració absoluta i sincera sobre la resta d’entrades. Les línies estretes de la resistència de tracció cap amunt de 40 kΩ s’interfacen mitjançant l’interruptor de seguretat del programa garantint l’activació del fre en cas d’obrir-se o apagar-se.
La taula de veritat de la lògica de commutació es mostra a continuació. S'utilitza una porta NOR de 4 entrades per examinar l'entrada de fre i les entrades als 3 BJT de sortida de la unitat superior.

L'objectiu sol ser desactivar la frenada abans que les sortides superiors de la unitat aconsegueixin un estat elevat. Això us permet evitar el lloguer sincronitzat dels interruptors d’alimentació superior i base.
En els programes de transmissió de motors de mitjana ona, els components de la unitat superior no són generalment necessaris i, en la majoria dels casos, es mantenen separats. Amb aquest tipus de circumstàncies, encara s’aconseguirà la frenada perquè la porta NOR detecta la tensió base a la sortida superior BJT de la unitat.
Amplificador d'errors
S'ofereix un amplificador d'error completament compensat d'eficiència amb accés actiu a cada entrada i sortida (pins # 11, 12, 13) per ajudar a l'execució del control de velocitat del motor de bucle tancat.
L’amplificador ve amb un guany de tensió CC estàndard de 80 dB, amplada de banda de 0,6 MHz, juntament amb un ampli rang de voltatge en mode comú d’entrada que s’estén des de terra fins a Vref.
En la majoria de programes de control de velocitat de bucle obert, l'amplificador es configura com un seguidor de tensió de guany d'unitat amb l'entrada no inversora acoblada a la font de tensió establerta.
Oscil·lador La freqüència de l'oscil·lador de rampa interior està connectada mitjançant els valors decidits per als elements de temporització RT i CT.
El condensador CT es carregarà a través de la sortida de referència (pin 8) mitjançant la resistència RT i es descarregarà a través d’un transistor de descàrrega interior.
El pic de la rampa i les tensions del pou són normalment de 4,1 V i 1,5 V corresponentment. Per oferir un descens decent entre el soroll audible i el rendiment de commutació de sortida, es recomana una freqüència d'oscil·lador en la selecció de 20 a 30 kHz. Feu referència a la figura 1 per a la selecció de components.
Modulador d'amplada de pols
La modulació d’amplada d’impulsos integrada ofereix un enfocament eficaç en potència per governar la velocitat del motor alterant la tensió estàndard atribuïda a cada bobinatge d’estator al llarg de la sèrie de commutació.
A mesura que es produeixen descàrregues CT, l’oscil·lador modela cada pestell, cosa que permet la conducció de les sortides superiors i inferiors de la unitat. El comparador PWM restableix el pestell superior i finalitza el llançament inferior de la sortida de la unitat un cop la rampa positiva de CT es converteix en un resultat superior a l'amplificador d'error.
El diagrama de temps del modulador d’amplada-amplada de pols es mostra a la figura 21.
La modulació de l'amplada de pols per a la gestió de la velocitat es presenta exclusivament a les sortides inferiors del disc. Límit de corrent El funcionament constant d'un motor que pot estar sobrecarregat significativament provoca un sobreescalfament i un funcionament inevitable.
Aquesta situació perjudicial es pot evitar fàcilment juntament amb l’ús de la restricció de corrent de cicle per cicle.
És a dir, tots els cicles es tracten com una funció independent. La restricció de corrent cicle per cicle s’aconsegueix rastrejant l’acumulació de corrent de l’estator cada vegada que s’activa un commutador de sortida i, després de detectar una situació de corrent elevada, desactivant l’interruptor instantàniament i mantenint-lo apagat durant el període pendent de l’interval de pujada de la rampa de l’oscil·lador.
El corrent de l’estator es transforma en una tensió mitjançant l’aplicació d’una resistència de detecció RS referencial a terra (Figura 36) en línia amb els 3 transistors de commutació de la part inferior (Q4, Q5, Q6).
El voltatge establert al llarg de la resistència anticipadora es supervisa amb l’entrada de detecció de corrent (pins 9 i 15) i es compara amb el punt de referència interior de 100 mV.
Les entrades actuals del comparador de sentit tenen un rang de mode comú d’entrada d’aproximadament 3,0 V.
En cas que se superi la tolerància de sentit actual de 100 mV, el comparador restableix el bloqueig de sentit inferior i finalitza la conducció de l’interruptor de sortida. El valor de la resistència de detecció actual és en realitat:
Rs = 0,1 / Istator (màxim)
La sortida Fault s'inicia en una situació d'amplificador alt. El paràmetre PWM de doble tancament assegura que només es produeix un sol impuls de desencadenament de sortida en el transcurs d'una determinada rutina d'oscil·lador, acabada o no per la sortida de l'amplificador d'error o del comparador de límit de corrent.
El regulador on-chip de 6,25 V (pin 8) ofereix corrent de càrrega per al condensador de temporització de l’oscil·lador, un punt de referència per a l’amplificador d’errors, que li permet subministrar 20 mA de corrent adequat per alimentar específicament els sensors en programes de baixa tensió.
A efectes de tensió més grans, això podria arribar a ser important per canviar la potència emesa pel regulador per la IC. Això s’aconsegueix definitivament amb l’ajut d’un altre transistor de pas, tal com es mostra a la figura 22.
Sembla que es va decidir un punt de referència de 6,25 V per permetre la representació del circuit NPN senzill, allà on el Vref-VBE superi el voltatge mínim essencial dels sensors Hall Effect per sobre de la calor.
Tenint un assortiment de transistors adequat i un dissipador de calor suficient, es pot adquirir fins a 1 amp de corrent de càrrega.
Bloqueig de subtensió
S'ha integrat un bloqueig de baixa tensió de tres vies per reduir el dany al CI i als transistors d'alimentació alternatius. Durant els factors d’alimentació baixa, s’assegura el fet que els circuits integrats i els sensors siguin completament funcionals i que hi hagi una tensió de sortida adequada de la unitat base.
Les fonts d'alimentació positives a l'IC (VCC) i les unitats baixes (VC) són examinades per comparadors independents que obtenen els seus llindars a 9,1 V. Aquesta etapa en particular garanteix un desplaçament de porta adequat necessari per aconseguir un RDS baix (activat) quan es condueix una potència ordinària. Equip MOSFET.
Sempre que energitzeu directament els sensors Hall des de la referència, apareix un funcionament inadequat del sensor en cas que la tensió de sortida del punt de referència caigui per sota de 4,5 V.
Es pot utilitzar un tercer comparador per reconèixer aquest problema.
Quan més d’un dels comparadors detecta una situació de baixa tensió, la sortida de fallada s’activa, les pujades superiors es posen i les sortides de la unitat base s’organitzen en un punt baix.
Cadascun dels comparadors incorpora histèresi per protegir-se de les amplituds quan es superen els llindars individuals.
Sortida d’error
La sortida de falles del col·lector obert (pin 14) s’havia destinat a oferir detalls d’anàlisi en cas d’avaria del procés. Té una capacitat de corrent de 16 mA i pot conduir específicament un díode emissor de llum per obtenir senyals visibles. A més, en realitat està convenientment interfaçat amb la lògica TTL / CMOS per utilitzar-lo en un programa governat per microprocessador.
La sortida de falles és efectiva baixa mentre es produeixen més d’una de les situacions posteriors:
1) Codis d'entrada del sensor no vàlids
2) Activació de sortida a la lògica [0]
3) Entrada de detecció de corrent superior a 100 mV
4) Bloqueig de baixa tensió, activació de 1 o superior dels comparadors
5) Apagat de calor, temperatura òptima de la unió màxima. Aquesta sortida exclusiva també es pot utilitzar per diferenciar entre l'engegada del motor o el funcionament suportat en una situació inundada.
Amb l'ajuda d'una xarxa RC entre la sortida de falles i l'entrada d'habilitació, això significa que podeu desenvolupar un tancament retardat amb retard en relació amb la sobrecorrent.
Els circuits addicionals que es mostren a la figura 23 ajuden a engegar sense esforç els sistemes de motors equipats amb càrregues inercials més elevades, donant un parell de captació suplementari, alhora que protegeixen de manera segura la protecció contra sobrecorrent. Aquesta tasca s'aconsegueix col·locant la restricció actual al valor següent al mínim durant un període establert. En el transcurs d’una situació de sobrecorrent extremadament llarga, el condensador CDLY es carregarà, evocant l’entrada d’habilitació per aconseguir la seva tolerància a un estat baix.
Ara es pot configurar un tancament pel cicle de retroalimentació positiva des de la sortida de fallada fins a l’activació de sortida. Quan es defineix, mitjançant l’entrada Current Sense, només es pot restablir en curtcircuit CDLY o en bicicleta les fonts d’alimentació.
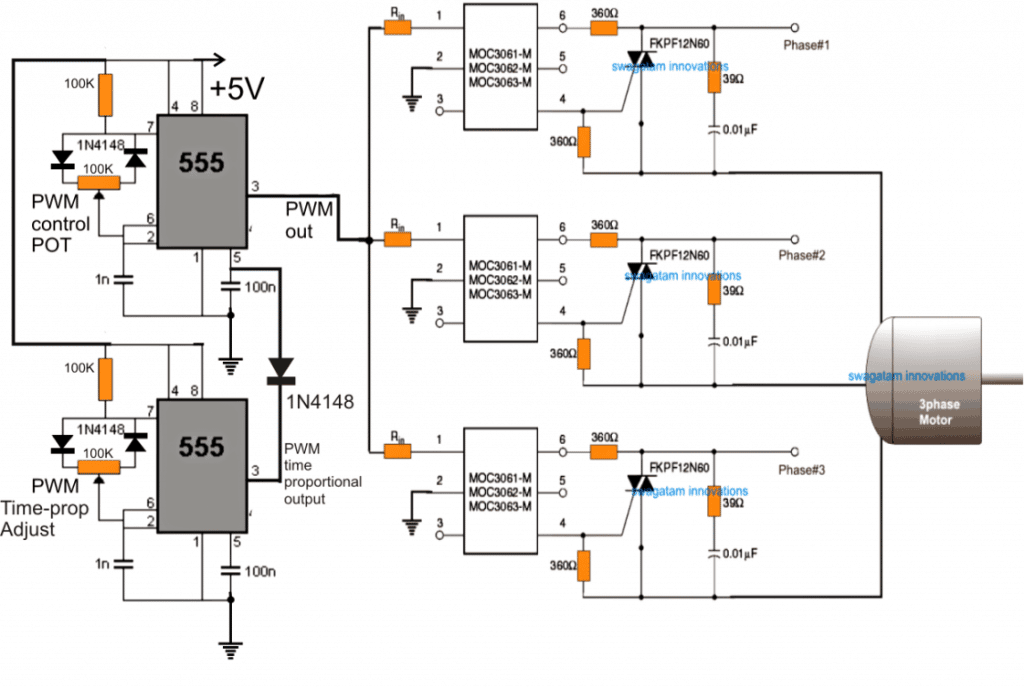
Esquema BLDC d'alta potència totalment funcional
A continuació es pot observar un circuit de control BLDC d’alta potència i alta intensitat totalment funcional que utilitza el dispositiu explicat anteriorment, que es configura com un mode d’ona completa, trifàsic i 6 passos:

Anterior: Càlcul de tensió, corrent en un inductor de Buck Següent: Feu aquest circuit de scooter elèctric / rickshaw