En aquest post aprendrem el concepte bàsic de treball dels escàners tèrmics o termòmetres IR sense contacte i també aprendrem a fer un pràctic prototip de bricolatge de la unitat sense Arduino .
A l’era posterior al COVID-19, és habitual veure testimonis de metges que tenien una pistola de temperatura sense contacte i que assenyalaven el front d’un sospitós de COVID-19.
El dispositiu és en realitat un termòmetre sense contacte, que detecta la temperatura instantània de la superfície corporal del sospitós i permet al metge saber si la persona és normal o pateix febre?

Mètode de prova bàsica
En el procés de proves, trobem la persona autoritzada que apunta un feix làser des de la pistola de temperatura sense contacte al front del sospitós i que observa la temperatura al panell LCD posterior del dispositiu.
En realitat, el feix làser no té cap connexió directa amb el procediment de mesura de temperatura. S'utilitza només per ajudar el metge a assegurar-se que el termòmetre d'infrarojos s'orienta correctament al lloc ideal del cos per determinar la temperatura corporal sobretot amb precisió.
Llei Stefan – Boltzmann
Tal com afirma la llei Stefan-Boltzmann, la sortida radiant total d'un cos Més(T) és proporcional a la quarta potència de la seva temperatura, com es mostra a la següent equació
Més(T) = εσT4
En aquesta equació, ε significa l'emissivitat.
σ indica la constant de Stefan-Boltzmann que equival a la quantitat 5.67032 x 10-1212 Wcm-2A-4, on la lletra K és la unitat de temperatura en Kelvin.
L'equació anterior suggereix que quan la temperatura d'un cos augmenta, la seva brillantor infraroja també augmenta proporcionalment. Aquesta radiació IR es podria mesurar a distància sense necessitat de cap contacte físic. La lectura ens pot proporcionar el nivell de temperatura instantani del cos.
Quin sensor és aplicable
El sensor més adequat i utilitzat en termòmetres sense contacte és un sensor de termopila .
Un sensor de termopila converteix un mapa de calor infraroig incident d'una font distant en una quantitat proporcional de petita tensió elèctrica.
Funciona sobre el principi del termoparell, en el qual metalls diferents s'uneixen en sèrie o paral·lel per crear unions 'calentes' i 'fredes'. Quan el flux radiant d'infrarojos d'una font cau sobre la termopila, crea una diferència de temperatura a través d'aquestes unions, desenvolupant una quantitat equivalent d'electricitat a través dels terminals finals del termoparell.
Aquesta potència elèctrica proporcional a la font de calor es pot mesurar per identificar el nivell de temperatura de la font del cos.
El termoparell dins d’un sensor de termopila està incrustat sobre un xip de silici que fa que el sistema sigui extremadament sensible i precís.
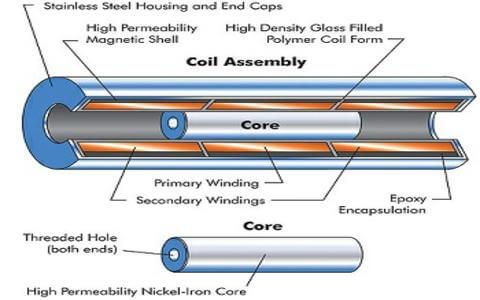
Utilització del sensor de termopila MLX90247
L’IC MLX90247 és un exemple excel·lent d’un dispositiu versàtil amb sensor de termopila que es pot utilitzar idealment per fabricar un dispositiu d’escàner tèrmic o un termòmetre sense contacte.

L’IC MLX90247 està format per una xarxa de termoparells apilats sobre la superfície d’una membrana.
Les juntes receptores de calor del termopar es col·loquen estratègicament a prop del centre de la membrana base, mentre que les juntes fredes diferencials es col·loquen a la vora del dispositiu que formen l’àrea massiva de silici de la unitat.
Atès que la membrana està dissenyada per ser un mal conductor de calor, la calor detectada de la font pot augmentar ràpidament a prop del centre de Menbrane que la vora massiva del dispositiu.
A causa d'això, es pot desenvolupar una ràpida diferència de calor a través dels extrems de la unió termopila, causant un potencial elèctric eficaç a través d'aquests terminals a través del principi termoelèctric.
La millor part del sensor de termopila és que, a diferència dels circuits integrats estàndard, no requereix un subministrament elèctric extern, sinó que genera el seu propi potencial elèctric per permetre la mesura necessària.
Obteniu dues variants de l’IC MLX90247, tal com es mostra a continuació, en què una variant proporciona una opció Vss de terra i l’altra sense pin Vss.

L'opció superior permet mesurar bipolarment la temperatura IR. És a dir, la sortida pot mostrar temperatures superiors a la temperatura ambient i també inferiors a les temperatures ambientals.
Es pot utilitzar l'opció inferior mesurar la temperatura ja sigui per sobre del nivell ambiental o per sota del nivell ambiental i, per tant, permet una mesura unipolar.
Per què s’utilitza el termistor a la termopila
A l’IC MLX90247 anterior, podem veure un termistor que s’inclou al paquet del dispositiu. El termistor té un paper important en la creació d’una sortida de nivell de referència per a l’etapa de la unitat de mesura externa.
El termistor s’incorpora per detectar la temperatura ambiental o la temperatura corporal del dispositiu. Aquest nivell de temperatura ambiental es converteix en el nivell de referència per a la fase de l'amplificador de sortida.
Mentre la temperatura IR des de l’objectiu sigui inferior o igual a aquest nivell de referència, l’etapa de l’amplificador d’amplificador operatiu extern no respon i la seva sortida continua sent 0 V.
No obstant això, tan aviat com la radiació IR del cos supera la temperatura ambiental, l'amplificador operatiu comença a respondre per produir una sortida mesurable vàlida que correspon linealment amb la pujada tèrmica del cos.
Circuit de termòmetre sense contacte mitjançant IC MLX90247 sensor de termopila

En el prototip de circuit anterior d’un circuit de termòmetre IR sense contacte, trobem el sensor de termopila IC MLX90247 en mode bipolar, configurat amb un amplificador operatiu extern dissenyat per amplificar elèctrics minúsculs de la termopila a una sortida mesurable.
L’amplificador operatiu superior amplifica la sortida del termopar des de l’IC MLX90247, mentre que l’ampli operatiu inferior amplifica la temperatura ambiental de l’IC.
Un diferencial senzill Comptador VU està connectat a les sortides dels dos amplificadors operatius. Mentre no hi hagi cap cos emissor de calor davant de la termopila, la seva temperatura interna del termopar es manté igual a la temperatura del termistor contigua. A causa d'això, les dues sortides d'amplificador operatiu generen la mateixa quantitat de voltatges. El mesurador VU indica així un 0 V al centre de la seva esfera.
En cas que un cos humà que tingui una temperatura més alta que la circumdant es trobi dins del rang de detecció de la termopila, la seva sortida de termopar a través del pin2 i el pin4 comença a augmentar exponencialment i supera la sortida del termistor a través del pin3 i el pin1.
Això provoca que l'amplificador operatiu superior generi més tensió positiva que l'amplificador operatiu inferior. El mesurador VU respon a això i la seva agulla comença a canviar pel costat dret del calibratge 0V. La lectura mostra directament el nivell de temperatura de l'objectiu detectat per la termopila.
Quin amplificador operatiu s'adapta a l'aplicació
Com que la sortida de la termopila se suposa que és en microvolts, l'ampli operatiu que s'ha d'utilitzar per amplificar aquest voltatge extremadament petit ha de ser altament sensible i sofisticat i amb una especificació de compensació d'entrada molt baixa. Per satisfer les condicions, un amplificador operatiu d’instrumentació sembla ser la millor opció per a aquesta aplicació.
Tot i que podeu trobar molts bons amplificadors d’instrumentació en línia, l’amplificador d’instrumentació INA333 Micro-Power (50μA), Zerø-Drift, Rail-to-Rail Out Instrumentation sembla ser el candidat més adequat.
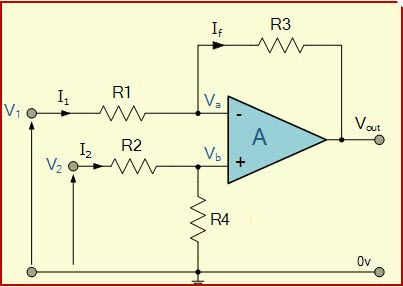
Hi ha moltes funcions fantàstiques que fan que aquest CI sigui el més adequat per amplificar els voltatges del termopar a magnituds mesurables. A continuació es pot veure un circuit amplificador d’instrumentació IC INA333 bàsic i aquest disseny es pot utilitzar per amplificar el circuit de termopila explicat anteriorment.

En aquest circuit amplificador op op INA333 la resistència RG determina el guany del circuit i es pot calcular mitjançant la fórmula:
Guany = 1 + 100 / RG
El resultat de sortida serà en kilo Ohms.
Mitjançant aquesta fórmula podem establir el guany global del circuit en funció del nivell de microvolt rebut de la termopila.
El guany es pot ajustar de 0 a 10.000, cosa que proporciona a l'amplificador operatiu un nivell excepcional de capacitat d'amplificació per a entrades de microvoltatge.
Per poder utilitzar aquest amplificador d’instrumentació sense IC termopila, necessitarem dos d’aquests mòduls amplificadors operatius. Un s'utilitzarà per amplificar la sortida del senyal del termoparell i l'altre s'utilitzarà per amplificar la sortida del senyal del termistor, com es mostra a continuació.

La configuració es pot utilitzar per fabricar un termòmetre IR sense contacte, que produirà una sortida analògica d'augment lineal en resposta a una calor d'IR d'augment lineal, tal com detecta la termopila.
La sortida analògica es pot connectar a un comptador VU milivolt o a mesurador digital de mV per obtenir una interpretació instantània del nivell de temperatura del cos.
La sortida Vo també es pot estimar mitjançant la següent equació:
Vo = G ( Va + - Ven- )
Llista de peces
Es necessitaran les següents parts per construir el circuit de termòmetre sense connexió explicat anteriorment:
- IC del sensor de termopila MLX90247 - 1no
- Instrumentació Op amplificador INA333 - 2nos
- Voltímetre amb un rang de 0 a 1V FSD - 1no
- Cèl·lules Ni-Cd de 1,2 V AAA per alimentar l'INA333 - 2nos
La lectura del voltímetre haurà de ser calibrada en centígrads, cosa que es pot fer amb alguna experimentació i assaig i error.
Utilitzant un PIR
A normal Sensor PIR també funciona molt bé i proporciona una alternativa econòmica per a aquest tipus d'aplicacions.
Un PIR inclou un sensor basat en material piroelèctric com TGS, BaTiO3, etc., que passa per una polarització espontània quan detecta un canvi de temperatura dins del seu rang de detecció.
La càrrega de polarització d’un dispositiu PIR generada a causa del canvi de temperatura depèn de la potència d’irradiació Phiés transmès pel cos al sensor PIR. Això fa que la sortida PIR generi un corrent Jod ωpAd( Δ T) .
El dispositiu també genera una tensió Vo que pot ser igual al producte del corrent Jod i la impedància del dispositiu. Això es pot expressar amb la següent equació:
Vo= JodRd/ √1 + ω2R2dC2d
Aquesta equació es pot racionalitzar en:
Vo= ωpAdRd( Δ T) / √1 + ω2R2dC2d
on p indica el coeficient piroelèctric, ω denota la freqüència radiana i Δ T és igual a la diferència de temperatura del detector Td
i temperatura ambient Ta.
Ara, aplicant l’equació del balanç de calor, trobem que el valor de Δ T es pot derivar tal com s’expressa en l’equació següent:
Δ T = RTPhiés/ √ (1 + ω2τ2T)
Si substituïm aquest valor de Δ T a l'equació anterior, obtenim un resultat que representa el Vo amb característiques de pas de banda, com es mostra a continuació:

on τÉS fa referència a la constant de temps elèctrica ( RdCd ), τT indica la
constant de temps tèrmic ( RTCT ), i Phiés simbolitza el radiant
potència de l'objectiu detectat pel sensor.
Les discussions i equacions anteriors demostren que el voltatge de sortida Vo d'un PIR és directament proporcional a la potència radiant emesa des de la font i, per tant, és ideal per a aplicacions de mesura de temperatura sense contacte.
Tanmateix, sabem que un PIR no pot respondre a una font IR de papereria i requereix que la font estigui en moviment per permetre una sortida llegible.
Com que la velocitat del moviment també afecta les dades de sortida, hem d’assegurar-nos que la font es mou amb una velocitat precisa, un aspecte que pot ser impossible d’implementar en un objectiu humà.
Per tant, és una manera fàcil de combatre-ho perquè l’objectiu humà sigui papereria i replici el seu moviment mitjançant la interfície d’un helicòpter basat en motor amb el sistema d’objectius PIR.
Prototip de termòmetre sense contacte mitjançant PIR
Els paràgrafs següents expliquen la configuració d'un sistema pràctic d'escàner tèrmic que es pot aplicar per construir un prototip pràctic, després d'una optimització completa dels diversos paràmetres implicats.
Com es va aprendre a la secció anterior, un PIR està dissenyat per detectar les emissions radiants en forma de velocitat de canvi de temperatura dT / dt i, per tant, només respon a una calor infraroig que és pulsada amb una freqüència calculada adequadament.
Segons els experiments, es constata que el PIR funciona millor a una freqüència de pols d’uns 8 Hz, cosa que s’aconsegueix mitjançant una picada constant del senyal entrant a través d’un servohelicòpter.
Bàsicament, la picada dels senyals permet al sensor PIR avaluar i emetre la potència radiant del cos com a pics de tensió. Si la freqüència de l’helicòpter està correctament optimitzada, el valor mitjà d’aquestes puntes serà directament proporcional a la intensitat de la temperatura radiant.
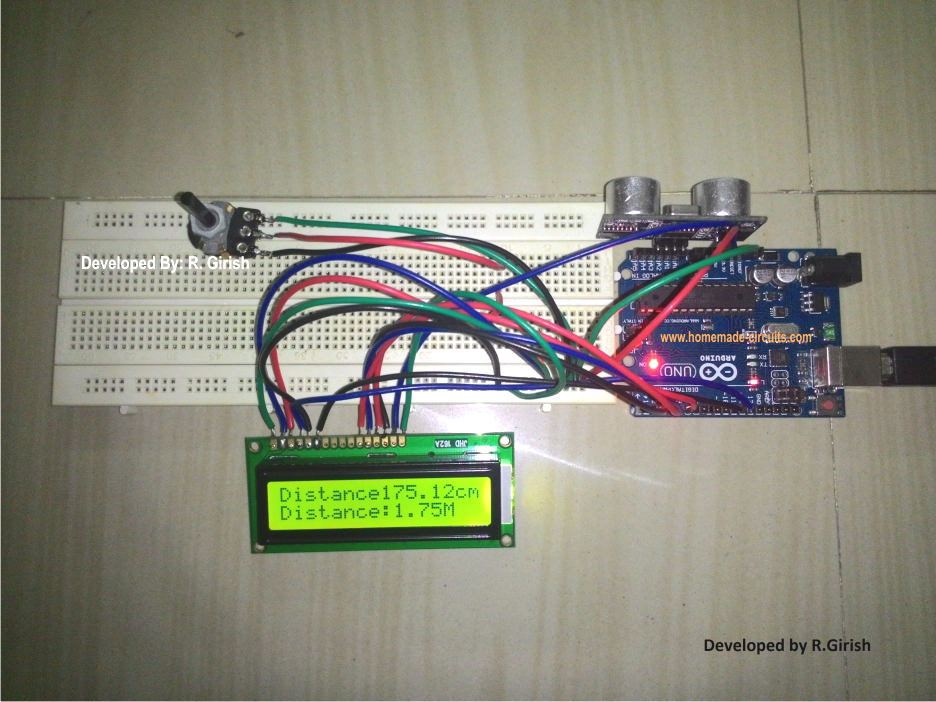
La imatge següent mostra una prova típica configurada per crear una unitat de mesura optimitzada o el MU.

Per garantir un funcionament eficient del sistema, la distància entre la font IR i el camp de visió del sensor (FOV) ha de ser d’uns 40 cm. En altres paraules, el cos radiant i la lent PIR han d'estar a una distància de 40 cm l'un de l'altre.
També podem veure un sistema picador que consisteix en un petit motor pas a pas amb una hèlix instal·lada entre la lent fresnel i el sensor piroelèctric PIR.
Com funciona
La radiació IR procedent del cos passa a través de la lent de Fresnel, a continuació, és picada a una freqüència de 8 Hz pel motor chopper i la radiació IR pulsada resultant és detectada pel sensor PIR.
La sortida de CA equivalent a aquest IR detectat s’aplica a l’etapa de “condicionador de senyal” realitzada amb moltes etapes d’amplificador operatiu.
La sortida final amplificada i condicionada del condicionador de senyal s’analitza en un oscil·loscopi per comprovar la resposta del circuit a una sortida radiant variable d’un cos.
Optimitzant el PIR i el Chopper
Per obtenir els millors resultats possibles, s’han d’assegurar els criteris següents per al PIR i l’associació de chopper.
El disc picador o les fulles s’han de col·locar per girar entre la lent Fresnel i el sensor intern PIR.
El diàmetre de la lent Fresnel no ha de ser superior a 10 mm.
La distància focal de l’objectiu ha d’estar al voltant dels 20 mm.
Tenint en compte el fet que la zona de detecció típica de Ad 1,6 mm Phi i s’instal·la a prop de la distància focal de l’objectiu, el camp de visió o FOV és de 4,58outilitzant la fórmula següent:
FOV(mig angle)≈ | tan-1[(ds/ 2) / f] | = 2,29o
En aquesta equació ds indica el diàmetre detectable del sensor i f és la distància focal de la lent.
Especificacions de la fulla de tallador
L'eficiència de treball del termòmetre sense contacte depèn en gran mesura de com es produeixi un impuls de l'infraroig incident a través del sistema de picador i

En aquest helicòpter s’han d’utilitzar les dimensions següents:
El picador hauria de tenir 4 fulles i un diàmetre de CC hauria de ser al voltant dels 80 mm. S'hauria de conduir a través d'un motor pas a pas o d'un circuit controlat per PWM.
La freqüència de rotació aproximada hauria de baixar al voltant de 5 Hz a 8 Hz per obtenir un rendiment òptim.
La lent fresnel PIR ha de situar-se 16 mm darrere del sensor piroelèctric, de manera que el diàmetre del senyal IR entrant que cau sobre la lent sigui d’uns 4 mm, i se suposa que aquest diàmetre és molt menor que el TW d’amplada de les dents de l’helicòpter. disc.
Conclusió
Un escàner tèrmic sense contacte o un termòmetre IR és un dispositiu molt útil que permet mesurar la temperatura del cos humà a distància sense cap contacte físic.
El cor d’aquest dispositiu és un sensor d’infrarojos que detecta el nivell de calor en forma de flux radiant d’un cos i el converteix en un nivell equivalent de potencial elèctric.
Els dos tipus de sensors que es poden utilitzar per a aquest propòsit són el sensor termopila i el sensor piroelèctric.
Tot i que físicament tots dos semblen semblants, hi ha una enorme diferència en el principi de funcionament.
Una termopila funciona amb el principi bàsic d’un termopar i genera un potencial elèctric proporcional a la diferència de temperatura a través de les seves unions de termoparells.
Un sensor piroelèctric que s’utilitza normalment en els sensors PIR funciona mitjançant la detecció del canvi de temperatura d’un cos quan el cos amb una temperatura superior a la temperatura ambiental creua el camp de visió del sensor. Aquest canvi de nivell de temperatura es converteix en una quantitat proporcional de potencial elèctric a la seva sortida
El fet que la termopila sigui un dispositiu lineal és molt més fàcil de configurar i implementar en totes les formes d’aplicacions d’escaneig tèrmic.
Referències:
Amplificador d’instrumentacióSensor tèrmic de mèlis
Termòmetre d'infrarojos
Anterior: Circuit automàtic de desinfectant de mans: completament sense contacte Següent: Circuits d'injecció de senyal per a la resolució ràpida de problemes de tots els equips d'àudio