El circuit VFD de 3 fases presentat ( dissenyat per mi ) es pot utilitzar per controlar la velocitat de qualsevol motor de corrent altern trifàsic o fins i tot d’un motor de corrent altern sense escombretes. La idea va ser sol·licitada pel senyor Tom
Utilitzant el VFD
El circuit VFD trifàsic proposat es pot aplicar universalment per a la majoria de motors de corrent altern trifàsics on l’eficiència de regulació no és massa crítica.
Es pot utilitzar específicament per controlar velocitat del motor d’inducció de la gàbia d’esquirol amb un mode de llaç obert, i possiblement també en el mode de llaç tancat, que es parlarà a la part posterior de l'article.
Es necessiten mòduls per a inversors de 3 fases
Per dissenyar el circuit VFD trifàsic o el variador de freqüència variable proposat, es requereixen essencialment les següents etapes fonamentals del circuit:
- Circuit controlador de tensió PWM
- Circuit de control de pont en H.
- Circuit generador de 3 fases
- Circuit convertidor de tensió a freqüència per generar paràmetres V / Hz.
Aprenem els detalls de funcionament de les etapes anteriors amb l'ajut de la següent explicació:
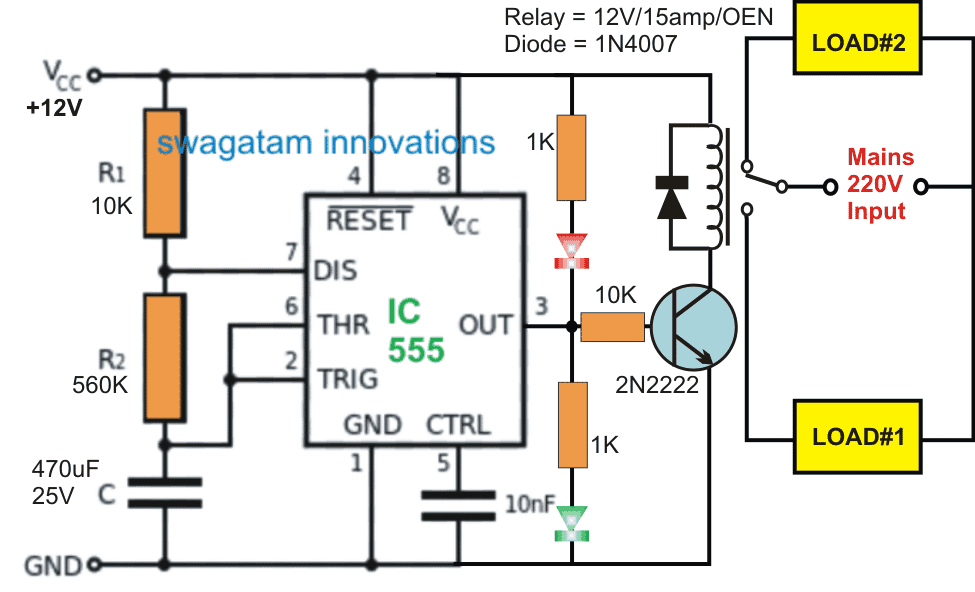
Es pot observar un senzill circuit de controlador de tensió PWM al diagrama que es mostra a continuació:

El controlador PWM
Ja he incorporat i explicat el funcionament de l'etapa anterior del generador de PWM, que bàsicament està dissenyada per generar una sortida PWM variable a través del pin3 de l'IC2 en resposta al potencial aplicat al pin5 del mateix IC.
El valor predeterminat de 1 K que es mostra al diagrama és el comandament de control RMS, que es pot ajustar adequadament per adquirir la quantitat proporcional desitjada de voltatge de sortida en forma de PWM al pin3 de IC2 per a un processament posterior. Es configura per produir una sortida corresponent que pot ser equivalent a la xarxa elèctrica de 220V o 120V CA RMS.
El circuit del conductor H-Bridge
El següent diagrama mostra un circuit de control de fase trifàsic de pont H amb un sol xip que utilitza l'IC IRS2330.
El disseny sembla senzill, ja que la majoria de les complexitats són gestionades pels sofisticats circuits integrats.
S’aplica un senyal trifàsic ben calculat a través de les entrades HIN1 / 2/3 i LIN1 / 2/3 de l’IC a través d’una etapa de generador de senyal trifàsica.
Les sortides del fitxer IC IRS2330 es pot veure integrat amb 6 mosfets o xarxa de ponts IGBT, els drenatges dels quals estan configurats adequadament amb el motor que cal controlar.
Les portes de mosfet / IGBT de la banda baixa s’integren amb el pin IC2 # 3 de l’etapa del circuit generador de PWM comentat anteriorment per iniciar la injecció de PWM a l’etapa de mosfet de pont. Aquesta regulació ajuda en última instància al motor a guanyar la velocitat desitjada segons els paràmetres (mitjançant el valor predefinit de 1 k al primer diagrama).

Al següent esquema visualitzem el circuit generador de senyal trifàsic requerit.

Configuració del circuit del generador trifàsic
El generador trifàsic es construeix al voltant d’un parell de xips CMOS CD4035 i CD4009 que generen senyals trifàsics dimensionats amb precisió a través dels pinouts mostrats.
La freqüència dels senyals trifàsics depèn dels rellotges d’entrada alimentats que haurien de ser 6 vegades el senyal trifàsic previst. És a dir, si la freqüència trifàsica necessària és de 50 Hz, el rellotge d’entrada hauria de ser de 50 x 6 = 300 Hz.
També implica que els rellotges anteriors es podrien variar per tal de variar la freqüència efectiva del CI del controlador, que al seu torn seria responsable de variar la freqüència operativa del motor.
No obstant això, atès que l'alteració de freqüència anterior ha de ser automàtica en resposta a la tensió variable, es fa imprescindible un convertidor de tensió a freqüència. La següent etapa tracta d'un circuit de convertidor de freqüència senzill i precís per a la implementació necessària.
Com es crea una relació V / F constant
Normalment en motors d’inducció, per tal de mantenir una eficiència òptima de la velocitat i toque del motor, cal controlar la velocitat de lliscament o la velocitat del rotor, que al seu torn es fa possible mantenint una relació V / Hz constant. Com que el flux magnètic de l’estator sempre és constant independentment de la freqüència de subministrament d’entrada, la velocitat del rotor es pot controlar fàcilment mantenint constant la relació V / Hz .
En un mode de bucle obert, això es pot fer aproximadament mantenint relacions V / Hz predeterminades i implementant-la manualment. Per exemple, al primer diagrama això es pot fer ajustant adequadament el valor predefinit R1 i 1K. R1 determina la freqüència i l'1K ajusta el RMS de la sortida, per tant, ajustant adequadament els dos paràmetres podem aplicar manualment la quantitat requerida V / Hz.
Tanmateix, per obtenir un control relativament precís del parell i la velocitat del motor d’inducció, hem d’implementar una estratègia de bucle tancat, en què les dades de velocitat de lliscament s’han d’alimentar al circuit de processament per a un ajust automàtic de la relació V / Hz perquè el valor sempre es manté gairebé constant.
Implementació dels comentaris del bucle tancat
El primer diagrama d'aquesta pàgina es pot modificar adequadament per dissenyar la regulació automàtica de V / Hz de bucle tancat, tal com es mostra a continuació:

A la figura anterior, el potencial al pin número 5 de l’IC2 determina l’amplada del SPWM que es genera al pin número 3 del mateix CI. Els SPWM es generen comparant la mostra d'ondulació de 12V de la xarxa al pin # 5 amb l'ona triangular al pin # 7 d'IC2, i això s'alimenta als mosfets laterals baixos per al control del motor.
Inicialment, aquest SPWM s’estableix en algun nivell ajustat (mitjançant 1K perset) que activa les portes IGBT laterals baixes del pont trifàsic per iniciar el moviment del rotor al nivell de velocitat nominal especificat.
Tan bon punt el rotor del rotor comença a girar, el tacòmetre connectat amb el mecanisme del rotor fa que es desenvolupi una quantitat proporcional de tensió addicional al pin # 5 de IC2, cosa que provoca que els SPWM s’ampliïn provocant més tensió a les bobines de l’estator del motor. Això provoca un augment addicional de la velocitat del rotor provocant més tensió al pin número 5 d’IC2, i això continua fins que la tensió equivalent SPWM ja no pot augmentar i la sincronització del rotor de l’estator aconsegueix un estat estacionari.
El procediment anterior es pot autoajustar durant els períodes operatius del motor.
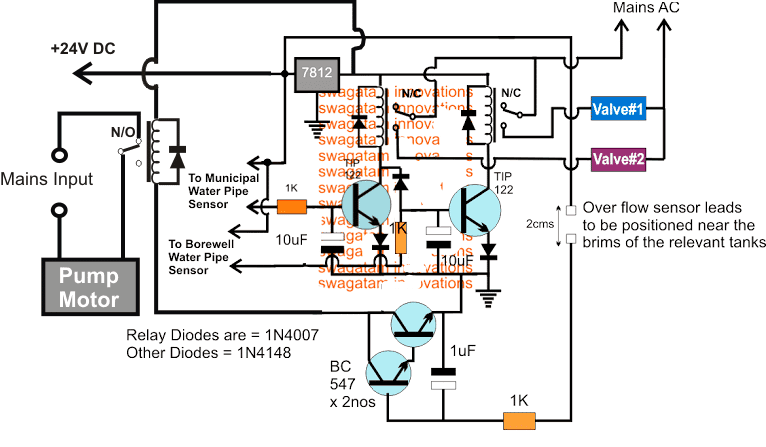
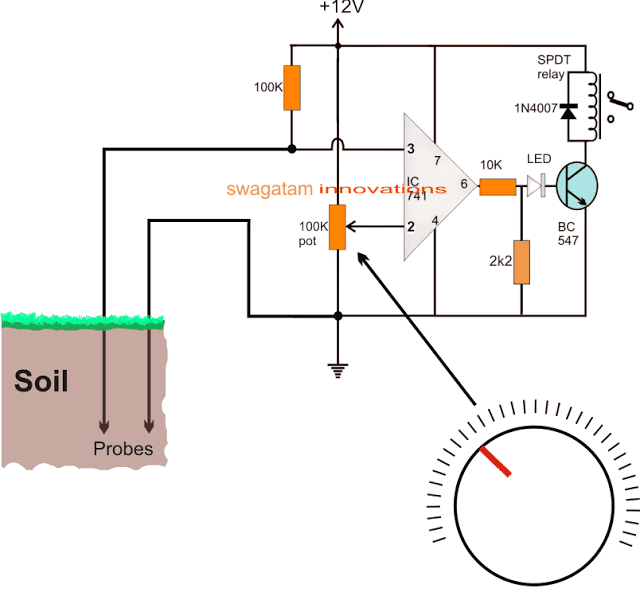
Com fer i integrar el tacòmetre
Es pot veure un disseny simple del tacòmetre al següent diagrama, que es podria integrar amb el mecanisme del rotor de manera que la freqüència de rotació sigui capaç d'alimentar la base del BC547.

Aquí les dades de velocitat del rotor es recopilen d’un sensor d’efecte hall o d’una xarxa LED / sensor IR i s’alimenten a la base de T1.
T1 oscil·la a aquesta freqüència i activa el circuit del tacòmetre configurant adequadament un circuit monoestable IC 555.
La sortida del tacòmetre anterior varia proporcionalment en resposta a la freqüència d’entrada a la base de T1.
A mesura que augmenta la freqüència, la tensió a la part extrema dreta també augmenta la sortida D3 i viceversa, i ajuda a mantenir la relació V / Hz a un nivell relativament constant.
Com controlar la velocitat
La velocitat del motor que utilitza V / F constant es pot aconseguir alterant la freqüència d'entrada a l'entrada de rellotge de l'IC 4035. Això es pot aconseguir alimentant una freqüència variable des d'un circuit astable IC 555 o qualsevol circuit astable estàndard a l'entrada de rellotge de IC 4035.
Canviar la freqüència canvia efectivament la freqüència de funcionament del motor, que correspon a la velocitat de lliscament.
Això és detectat pel tacòmetre i el tacòmetre redueix proporcionalment el potencial al pin # 5 de l’IC2, que al seu torn redueix proporcionalment el contingut de SPWM al motor i, en conseqüència, es redueix la tensió del motor, garantint la variació de la velocitat del motor proporció V / F requerida.
Un convertidor casolà de V a F

En el circuit convertidor de tensió a freqüència anterior s’utilitza un IC 4060 i la seva resistència dependent de la freqüència es veu influïda a través d’un conjunt LED / LDR per a les conversions previstes.
El conjunt LED / LDR està segellat dins d’una caixa a prova de llum i el LDR es col·loca a través d’una resistència de 1 M dependent de la freqüència del CI.
Atès que la resposta LDR / LDR és bastant lineal, la il·luminació variable del LED al LDR genera una freqüència proporcionalment variable (creixent o decreixent) a través del pin3 del CI.
El FSD o el rang V / Hz de l’escenari es podrien configurar configurant adequadament la resistència 1M o fins i tot el valor C1.
El LED és el voltatge que es deriva i s’il·lumina a través dels PWM des de la primera etapa del circuit PWM. Implica que a mesura que varien els PWM, la il·luminació del LED també variarà, cosa que al seu torn donaria lloc a una freqüència proporcionalment creixent o decreixent al pin3 de l'IC 4060 del diagrama anterior.
Integració del convertidor amb VFD
Aquesta freqüència variable de l’IC 4060 ara només s’ha d’integrar amb l’entrada de rellotge IC CD4035 del generador trifàsic.
Les etapes anteriors formen els ingredients principals per fer un circuit VFD de 3 fases.
Ara, seria important debatre sobre el BUS CC necessari per subministrar els controladors de motor IGBT i sobre els procediments de configuració per a tot el disseny.
El BUS DC aplicat a través dels rails del pont H IGBT es pot obtenir rectificant l’entrada de xarxa trifàsica disponible mitjançant la configuració del circuit següent. Els carrils IGBT DC BUS estan connectats a través dels punts indicats com a 'càrrega'

Per a una font monofàsica, la rectificació es pot implementar mitjançant la configuració de xarxa de pont de 4 díodes estàndard.
Com configurar el circuit VFD trifàsic proposat
Es pot fer segons les instruccions següents:
Després d'aplicar la tensió del bus de CC a través dels IGBT (sense que el motor estigui connectat), ajusteu la configuració predeterminada PWM 1k fins que la tensió dels rails sigui igual a les especificacions de tensió del motor previstes.
A continuació, ajusteu el preajust IC 4060 1M per tal d’ajustar qualsevol de les entrades IC IRS2330 al nivell de freqüència correcte requerit segons les especificacions del motor donades.
Un cop finalitzats els procediments anteriors, el motor especificat es pot connectar i subministrar amb diferents nivells de voltatge, paràmetre V / Hz i confirmar-se per a operacions automàtiques de V / Hz sobre el motor connectat.
Anterior: Com construir un circuit de llum creixent Següent: Circuit de descalcificador d'aigua explorat