L'article parla d'un circuit de control remot d'infrarojos (IR) que està configurat per operar un motor de corrent continu en resposta a la commutació d'un telèfon remot IR estàndard, com ara un comandament de TV o un control remot de DVD.
El motor connectat es pot moure de qualsevol manera i també es pot fer aturar.
El circuit es pot entendre amb les següents explicacions:
Com funciona
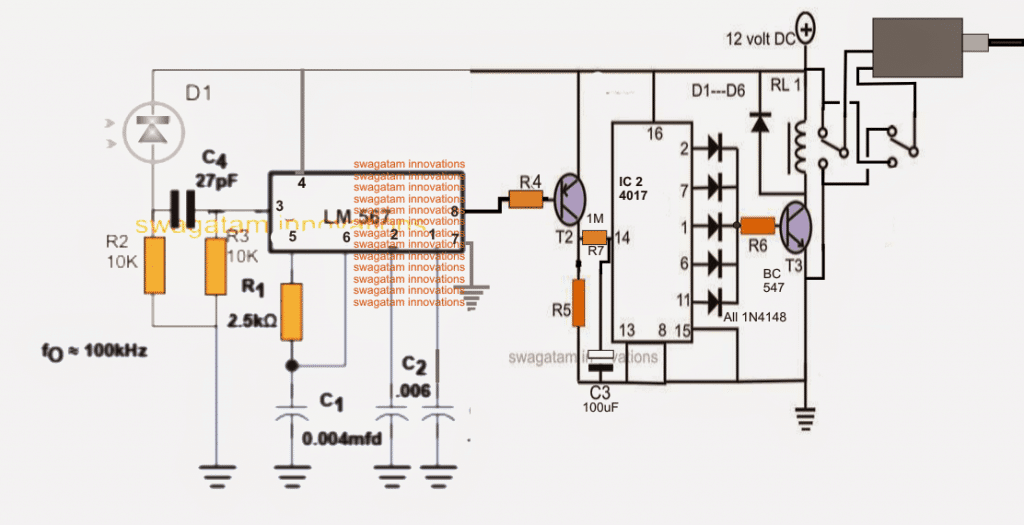
Com es pot veure al diagrama de circuits donat, el sensor és qualsevol mòdul de sensor IR de tres pins estàndard que normalment respondria a qualsevol auricular remot de TV.
Quan un feix IR (infrarojos) està enfocat al sensor, el pin que es designa com a sortida es converteix en una lògica baixa. Aquesta situació persisteix mentre el feix es mantingui enfocat cap a ella.
El transistor T1 que és un PNP respon a aquest senyal de baixa lògica i condueix la commutació del relé RL1 connectat.
Els contactes connecten instantàniament el potencial positiu instantani al col·lector del transistor al pin núm. 14 de l'IC1, que es connecta com un circuit de xancla.
Suposant que la seqüència lògica inicial estigui al pin # 3 de l'IC, l'activador anterior desplaça la seqüència al pin # 2 de l'IC, fent-la alta.
Això engega T2 i el relé RL2 corresponent.
RL2 condueix i connecta el cable particular del motor a una alimentació negativa. Com que l'altre terminal del motor obté un resultat positiu de RL3, comença a moure's en la direcció establerta.
Ara suposem que al sensor se li dóna un activador posterior a través del telèfon remot IR, el procés anterior es repeteix i la seqüència de sortida canvia del pin núm. 2 al pin número 4 de l'IC1, que s'activa instantàniament T3 mentre s'apaga T2.
L'acció anterior reverteix les connexions del relé obligant el motor a capgirar instantàniament la seva direcció de rotació.
Amb un altre activador posterior des de l'auricular remot, la seqüència rebota cap enrere al pin número 3, que no està connectat a res i resulta en apagar completament el motor.
La inclusió de L1, C1 garanteix que els circuits no es vegin influenciats si es produeix un disparament espuri del sensor.
Es pot experimentar L1 per obtenir el valor òptim, de manera que 'motiva' només els senyals externs perduts accidentals i no els senyals IR reals d'un auricular de control remot.


Llista de peces del circuit de control remot IR (infraroig) anterior.
R1 = 100 ohms,
R2 = 1K
R3, R4, R5, R6, R7 = 10K
C1, C4, C6 = 100uF / 25V
C2, C3, C7 = 0,22uF
C5 = 1000uF / 25V
C6 = 0,22uF
L1 = 100mH sufocació
T1 = BC557
T2, T3 = BC547
D1 --- D7 = 1N4007
IC1 = IC4017
IC2 = 7812
Tots els relés = 12V / 400 ohms / SPDT
sensor = TSOP1738
Motor = motor 12V CC
Anterior: utilitzar un termistor NTC com a supressor de sobretensions Següent: Circuit d'alimentació compacte MJE13005 220V