El missatge explica un circuit senzill de controlador de motor controlat per làser de línia, que funciona responent a una línia làser horitzontal de precisió, generat des d’un dispositiu de nivell làser de línia, i que ajusta automàticament l’alineació de l’eina connectada o el treball de la feina amb una perfecció i precisió extremes.
Què és Line Laser
L’equip làser de línia és un substitut electrònic d’alta precisió de l’alineador de nivells espirituals de fustes.
El dispositiu làser de línia és en realitat un equip avançat d’emissió de làser que pot generar 360 ° línia làser horitzontal il·luminada d’alta precisió, per proporcionar una referència de calibratge a tots els treballs d’enginyeria industrial o de construcció, de manera que el resultat final del treball sigui perfectament recte i alineat sense cap mínim error.
El circuit va ser sol·licitat per un dels lectors dedicats d’aquest bloc, el senyor Rafal.
Els debats detallats sobre el procediment de treball del motor controlat per làser de línia es poden aprendre als següents paràgrafs:
Objectiu de disseny
Sr. Rafal: Sóc molt nou en això. He fet algunes investigacions les darreres setmanes i no he trobat exactament el que necessito.
Agrairé qualsevol ajuda. Adjunto una foto de la meva idea. Vull controlar dos motors de 12 V CC amb un nivell làser.
El nivell de làser de línia senyalitzarà els receptors.

Aquest senyal haurà de controlar la direcció del motor de 12 V CC. El motor fa girar la barra roscada cap endavant i cap enrere per ajustar l'alçada de l'eina.
Pel que vaig descobrir, hi hauria diversos fotodíodes connectats en paral·lel, un establert per detectar el làser per sobre del nivell zero i l’altre per sota d’aquest nivell. El nivell nul és només una mena de pausa entre els fotodíodes per evitar que el sistema es desperti. Sensor làser sense pantalla. Només vaig donar una foto pictòrica.
Necessito un circuit de pont H, però tots els que he trobat s'han d'utilitzar amb un sistema Arduino. Si cal, puc comprar un pont ja fet per un preu raonable de fins a 30 dòlars
L’ideal seria que funcionés amb làsers vermells i verds, però les longituds d’ona són tan diferents que dubto que es pogués fer i no funcionaria a tot l’espectre de llum.
Inicialment, m’agradaria establir el nivell d’aquest feix unit als motors amb els botons amunt i avall. Estaria encantat que el segon motor s’anivellés amb el giroscopi mentre el configurava, però sense l’Arduino pot ser molt difícil.
Crec que el que intento fer és tan senzill que puc fugir sense fer servir Arduino. I insisteixo en un analògic, a causa de les condicions difícils en un lloc de construcció i em sembla que com més electrònica, més poc fiable és el dispositiu.
Només funcionarà a l'interior i la distància làser és màxima de 10 m. El motor que vaig trobar al principi té un gran consum de corrent de 200 mA com a màxim 2,19 A, però també un parell elevat.
Alimentació de 18 V CC des d’una bateria Makita.
Gràcies per endavant per qualsevol suggeriment.
Salutacions des de Polònia
Rafal
Swag : Tinc una confusió sobre el funcionament dels eixos del motor. El cargol roscat dels dos motors empènyerà l'eina, però no la pot tirar enrere? Com funciona això?
És possible implementar el mateix amb un sol motor?
Sr. Rafal: Les vores d’anivellament inferiors serien potser de 70 cm, només per a habitacions petites, p. un vàter perquè pugueu entrar per una porta.
Màquina sense accionament, estirada a mà i només anivells. Al vídeo, els dos objectes grocs dels pals són detectors làser units rígidament a les vores.
El làser es troba en algun lloc més lluny i produeix una línia horitzontal.
Els motors estarien connectats a un carro i el cargol roscat a les vores d’anivellament amb detectors làser. Hi ha d’haver dos motors per anivellar els dos costats, però és una imatge de mirall.
L'única part comuna seria un pont en H de dos canals, com si ho fes des d'un mòdul ja fet i possiblement un giroscopi, però això és un somni :).
És important que hi hagi botons per a revolucions dels motors esquerre i dret.
El procediment és aquest. Penjo el làser, per exemple, a 2 m per sobre del nivell del sòl designat. Mesuro 2 metres des del feix làser fins a la vora inferior de les vores.
Regulo l'alçada prement els botons dels interruptors dreta-esquerra de manera que sigui igual a 2 metres fins a la vora inferior de les vores. Vaig posar els detectors als pals de manera que el feix làser estigués a zero entre les seccions del fotodiode. I la resta ho farà ell mateix
Al fitxer adjunt he posat un dibuix del funcionament del detector.
Rafal
Disseny de circuits

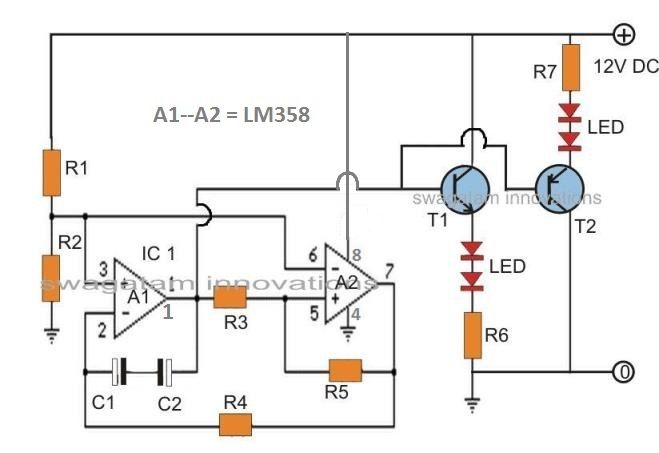
Observant la figura anterior, es necessitaran dues etapes de circuit idèntiques per detectar i corregir l’eina associada controlada pel motor respecte a la precisió de la rectitud del làser.
Les dues etapes idèntiques són imatges reflectides les unes de les altres, tal com es mostra a continuació:

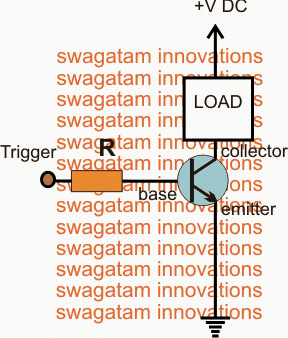
El circuit és bastant senzill. Funciona amb un comparador de finestres que garanteix que els motors d’acció no funcionin sempre que el parell de LDR quedi exposat amb la mateixa brillantor de la línia làser.
A continuació, es genera una mitja tensió d’alimentació a l’entrada no inversora d’A1 i a l’entrada inversora d’A2.
Tan bon punt es detecta una deflexió a la línia làser (que pot passar si l'eina controlada pel motor no està alineada recta), la brillantor que afecta els LDR R1 i R2 canvia.
En aquesta situació, la tensió d'entrada al comparador de finestres s'allunya de la meitat de la tensió d'alimentació. Aquesta situació fa que la sortida del comparador ordeni a la xarxa de ponts del motor que mogui el motor en sentit horari o antihorari.
Transistors T1. . . Els T4 es configuren com una xarxa pont per permetre l’engegada del motor direccions cap endavant i cap enrere depenent de la il·luminació LDR o de l’angle de desviació de la línia làser.
Els díodes D1. . . Els D4 estan posicionats per cancel·lar els pics de tensió generats durant el temps en què el motor està en funcionament. La funció dels potenciòmetres predefinits P1 i P2 és facilitar els ajustos d'alineació.
Estan ajustats per garantir que el motor estigui completament apagat i inactiu sempre que el parell LDR corresponent estigui exposat a la mateixa brillantor de la llum làser.
Diguem per exemple, a causa de l'alineació incorrecta de l'eina controlada pel motor, la inclinació de la línia làser fa que la llum es redueixi a LDR R2 que a LDR R1. Això farà que la tensió del punt A pugi per sobre de la meitat de la tensió d’alimentació.
En aquesta situació, la sortida de l’ampli operatiu A1 augmenta, cosa que obliga els transistors T1 i T4 a funcionar. Al seu torn, això fa que el motor giri en la direcció corresponent. Aquesta acció desplaça automàticament l'eina connectada en línia recta fins que la seva precisió d'alineació horitzontal coincideixi amb la precisió de la línia làser.
Per contra, si suposem que l’eina s’inclina amb l’orientació oposada de manera que la il·luminació dels LDR sigui oposada a la comentada anteriorment, la tensió del punt A caurà per sota de la meitat de la tensió d’alimentació. Aquesta condició desencadena l'amplificador de sortida A2 de sortida de manera que T3 i T2 siguin operatius.
Això fa que el motor funcioni ara en la direcció oposada, en un intent de corregir l'alineació de l'eina en la direcció corresponent fins que es converteixi perfectament en recta coincidint amb la precisió horitzontal de la línia làser.
Botó amunt / avall
Els botons amunt cap avall per preestablir inicialment l’alçada del nivell espiritual es poden implementar simplement mitjançant el cablejat d’interruptors de botons en paral·lel a cadascun dels LDR.
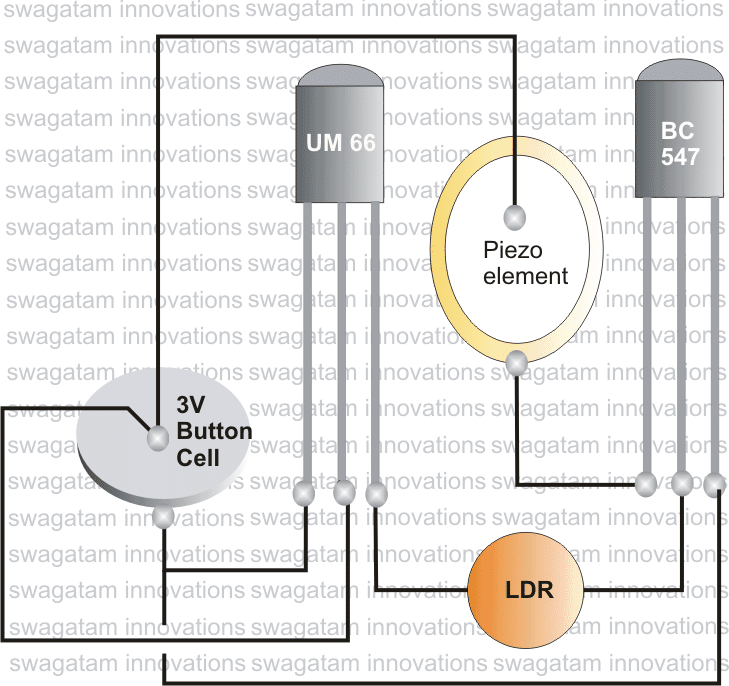
Instal·lació de LDR
Per obtenir la resposta correcta dels LDR, els parells esquerra dreta s’han d’instal·lar a l’interior d’un recinte com un tub de manera que siguin capaços de “veure” només la il·luminació làser i no cap altra llum ambiental.
La idea es pot veure en la següent imatge:

Aquí podem veure que els LDR es col·loquen molt a prop l’un de l’altre, cosa que assegura que quan la línia làser es troba al centre exacte, alguna porció dels dos parells LDR s’il·lumina uniformement amb la llum làser.
La part frontal del recinte LDR es podria cobrir amb una lent difusa, de manera que la il·luminació del làser es pogués difondre a l'interior sobre els LDR respectius.
Anterior: Circuit d'alarma antirobatori senzill per protegir articles valuosos Següent: Circuit de proves universal BJT, JFET, MOSFET