En aquest projecte reduirem 12v CC a qualsevol valor CC entre 2 i 11 volts. El circuit que baixa la tensió de CC es coneix com a convertidor de buck. La tensió de sortida o de descens necessària es controla mitjançant un potenciòmetre connectat a arduino.
A càrrec d’Ankit Negi
INTRODUCCIÓ A CONVERTIDORS:
Bàsicament hi ha dos tipus de convertidors:
1. Convertidor de dòlars
2. Boost convertidor
Tots dos convertidors canvien la tensió d'entrada segons el requisit. Són similars a transformador amb una diferència principal. Mentre que el transformador augmenta / baixa una tensió de corrent altern, els convertidors de corrent continu augmenten / baixen de tensió de corrent continu. Els components principals dels dos convertidors són:
A. MOSFET
B. INDUCTOR
C. CAPACITADOR
BUCK CONVERTER: com el seu propi nom indica, Buck significa reduir la tensió d'entrada. Convertidor de dòlars ens proporciona una tensió inferior a la tensió de corrent continu amb una alta capacitat de corrent. És una conversió directa.
BOOST CONVERTER: com el seu propi nom indica, augmentar significa augmentar la tensió d'entrada.
El convertidor Boost ens proporciona un voltatge continu més que el voltatge continu a l’entrada. També és una conversió directa.
** en aquest projecte farem un circuit de conversió de buck per baixar 12 v DC utilitzant arduino com a font PWM.
CANVI DE FREQÜÈNCIA PWM EN ELS PINS ARDUINO:
Els pins PWM d’arduino UNO són 3, 5, 6, 9, 10 i 11.
Per realitzar PWM, l'ordre que s'utilitza és:
analogWrite (PIN PWM NO, VALOR PWM)
i la freqüència PWM d'aquests pins són:
Per als pins Arduino 9, 10, 11 i 3 ---- 500Hz
Per als pins Arduino 5 i 6 ---- 1 kHz
Aquestes freqüències són adequades per a usos generals, com ara esvair un led. Però per a circuits com convertidor de buck o boost , es necessita una font PWM d'alta freqüència (en el rang de desenes de KHZ) perquè el MOSFET necessita una freqüència alta per a una commutació perfecta i també l'entrada d'alta freqüència disminueix el valor o la mida de components del circuit com inductor i condensador. Per tant, per a aquest projecte necessitem una font PWM d'alta freqüència.
El millor és que podem canviar la freqüència PWM dels pins PWM d'arduino mitjançant un codi senzill:
FOR ARDUINO UN:
Freqüència PWM disponible per a D3 i D11:
// TCCR2B = TCCR2B i B11111000 | B00000001 // per a una freqüència PWM de 31372,55 Hz
// TCCR2B = TCCR2B i B11111000 | B00000010 // per a una freqüència PWM de 3921,16 Hz
// TCCR2B = TCCR2B i B11111000 | B00000011 // per a una freqüència PWM de 980,39 Hz
TCCR2B = TCCR2B i B11111000 | B00000100 // per a una freqüència PWM de 490,20 Hz (EL DEFAULT)
// TCCR2B = TCCR2B i B11111000 | B00000101 // per a una freqüència PWM de 245,10 Hz
// TCCR2B = TCCR2B i B11111000 | B00000110 // per a una freqüència PWM de 122,55 Hz
// TCCR2B = TCCR2B i B11111000 | B00000111 // per a una freqüència PWM de 30,64 Hz
Freqüència PWM disponible per a D5 i D6:
// TCCR0B = TCCR0B i B11111000 | B00000001 // per a una freqüència PWM de 62500,00 Hz
// TCCR0B = TCCR0B i B11111000 | B00000010 // per a una freqüència PWM de 7812,50 Hz
TCCR0B = TCCR0B i B11111000 | B00000011 // per a una freqüència PWM de 976,56 Hz (EL DEFAULT)
// TCCR0B = TCCR0B i B11111000 | B00000100 // per a una freqüència PWM de 244,14 Hz
// TCCR0B = TCCR0B i B11111000 | B00000101 // per a una freqüència PWM de 61,04 Hz
Freqüència PWM disponible per a D9 i D10:
// TCCR1B = TCCR1B i B11111000 | B00000001 // defineix el temporitzador 1 divisor a 1 per a la freqüència PWM de 31372,55 Hz
// TCCR1B = TCCR1B i B11111000 | B00000010 // per a una freqüència PWM de 3921,16 Hz
TCCR1B = TCCR1B i B11111000 | B00000011 // per a una freqüència PWM de 490,20 Hz (EL DEFAULT)
// TCCR1B = TCCR1B i B11111000 | B00000100 // per a una freqüència PWM de 122,55 Hz
// TCCR1B = TCCR1B i B11111000 | B00000101 // per a una freqüència PWM de 30,64 Hz
** utilitzarem el pin núm. 6 per a PWM, d’aquí el codi:
// TCCR0B = TCCR0B i B11111000 | B00000001 // per a una freqüència PWM de 62,5 KHz
LLISTA DE COMPONENTS:
1. ARDUINO UN
2. INDUCTOR (100Uh)
3. DIODE SCHOTTKY
4. CAPACITADOR (100uf)
5. IRF540N
6. POTENCIOMETRE
7. 10k, 100ohm RESISTOR
8. CARGA (motor en aquest cas)
9,12 V BATERIA
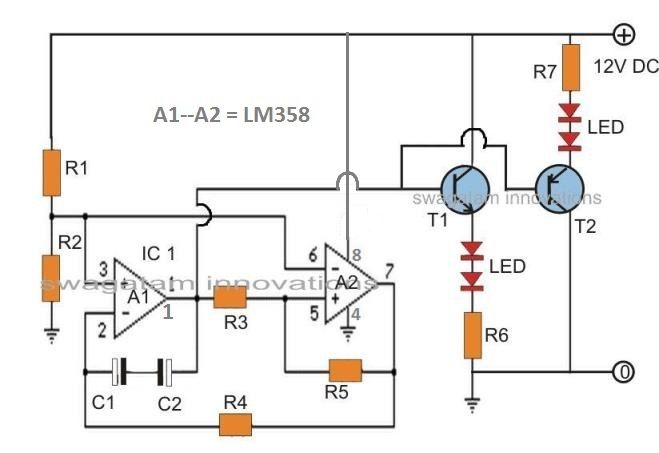
ESQUEMA DE CONNEXIONS


Feu les connexions tal com es mostra al diagrama de circuits.
1. Connecteu els terminals finals del potenciòmetre al pin de 5v i al pin de terra de l’arduino UNO respectivament, mentre que el terminal del netejador al pin analògic A1.
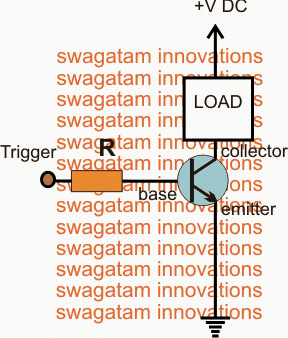
2. Connecteu el pin 6 de l'arduino PWM a la base del mosfet.
3. Terminal positiu de la bateria per drenar el mosfet i negatiu a la terminal p del díode schottky.
4. Des del terminal p del díode schottky, connecteu la càrrega (motor) en sèrie amb l'inductor al terminal font del mosfet.
5. Ara connecteu el terminal n del díode schottky al terminal font del mosfet.
6. Connecteu el condensador 47uf a través del motor.
7. Per fi, connecteu el pin de terra de l'arduino al terminal d'origen del mosfet.
Finalitat del mosfet:
El Mosfet s’utilitza per canviar el voltatge d’entrada a alta freqüència i per proporcionar un alt corrent amb menys dissipació de calor.
Finalitat de l'arduino:
Per a una alta velocitat de commutació del mosfet (a una freqüència de 65 KHz aproximadament)
Finalitat de l’inductor:
Si aquest circuit s’executa sense connectar un inductor, hi ha moltes possibilitats de danyar el mosfet a causa de pics d’alta tensió al terminal del mosfet.
Per evitar que el mosfet d'aquests pics d'alta tensió es connecti com es mostra a la figura, ja que quan el mosfet està emmagatzema energia i quan el mosfet està apagat, lliura aquesta energia emmagatzemada al motor.
Propòsit del díode schottky:
Suposem que el díode schottky no està connectat al circuit. En aquest cas, quan el mosfet està apagat, l’inductor allibera la seva energia a la càrrega o al motor que té un efecte molt lleu sobre la càrrega perquè hi ha un bucle incomplet perquè el corrent flueixi. Així, el díode schottky completa el bucle perquè el corrent flueixi. Ara no es connecta un díode normal aquí perquè el díode schottky té una baixa caiguda de tensió cap endavant.per indicar la baixa tensió a través de la càrrega.
Finalitat del potenciòmetre:
Potenciòmetre dóna valor analògic a arduino (basat en la posició del terminal del netejador) segons el qual el voltatge pwm és rebut pel terminal de la porta del mosfet des del pin 6 PWM d'Arduino. Aquest valor controla finalment el voltatge de sortida a través de la càrrega.
Per què es connecta la resistència entre la porta i la font?
Fins i tot una petita quantitat de soroll pot activar el mosfet. Per tant, a tirar cap avall la resistència està connectat entre la porta i la terra, és a dir, la font.
Codi del programa
Burn this code to arduino:
int m // initialize variable m
int n // initialize variable n
void setup()
B00000001 // for PWM frequency of 62.5 KHz on pin 6( explained under code section)
Serial.begin(9600) // begin serial communication
void loop()
{
m= analogRead(A1) // read voltage value from pin A1 at which pot. wiper terminal is connected
n= map(m,0,1023,0,255) // map this ip value betwenn 0 and 255
analogWrite(6,n) // write mapped value on pin 6
Serial.print(' PWM Value ')
Serial.println(n)
}
EXPLICACIÓ DEL CODI
1. La variable x és el valor de tensió rebut del pin A1 al qual està connectat el terminal de l’eixugaparabrises.
2. A la variable y se li assigna el valor assignat entre 0 i 255.
3. ** Com ja s'ha explicat a la secció anterior per a circuits com el convertidor Buck o Boost, cal una font PWM d'alta freqüència (en el rang de desenes de KHZ) perquè el MOSFET necessita una freqüència alta per a una commutació perfecta i l'entrada d'alta freqüència disminueix el valor o la mida de components del circuit com inductor i condensador.
Per tant, utilitzarem aquest codi senzill per generar una tensió pwm d'aprox. Freqüència de 65 kHz: TCCR0B = TCCR0B i B11111000 | B00000001 // per a una freqüència PWM de 62,5 KHz al pin 6
Com funciona:
Atès que el potenciòmetre dóna valor analògic a arduino (basat en la posició del terminal del netejador), això determina el valor de tensió pwm rebut pel terminal de la porta del mosfet des del pin 6 PWM d'Arduino.
I aquest valor controla en última instància el voltatge de sortida a través de la càrrega.
Quan el mosfet està en inductor, emmagatzema energia i quan s’apaga, aquesta energia emmagatzemada s’allibera a la càrrega, és a dir, al motor, en aquest cas. I com que aquest procés té lloc a una freqüència molt alta, obtenim un descens de la tensió de CC a través del motor que depèn de la posició del terminal de l’eixugaparabrises, ja que el mosfet és un dispositiu dependent de la tensió.Imatges de prototipus:



 Videoclip del circuit de convertidor explicat anteriorment utilitzant Arduino
Videoclip del circuit de convertidor explicat anteriorment utilitzant Arduino
Anterior: Circuit digital de mesurador de cabal digital simple amb Arduino Següent: 4 circuits senzills de sensor de proximitat: mitjançant IC LM358, IC LM567, IC 555