En aquest post discutim uns quants circuits de protecció del motor de CC de condicions nocives, com ara situacions de sobretensió i sobretensió, sobrecorrent, sobrecàrrega, etc.
Molts dels usuaris solen experimentar fallades del motor de corrent continu, especialment en llocs on el motor corresponent funciona durant moltes hores al dia. Substituir les parts del motor o el propi motor després d’una avaria pot resultar bastant costós, cosa que ningú agraeix.
Em va fer una sol·licitud d’un dels meus seguidors per resoldre el problema anterior, escoltem-ho del senyor Genga Oyebanji, àlies Big Joe.
Especificacions tècniques
'Veient el mal que la nostra font d'alimentació ha causat a la majoria dels nostres aparells elèctrics, és necessari construir un mòdul de protecció per als nostres aparells que els protegeixi de les fluctuacions de potència.
L’objectiu del projecte és dissenyar i construir un mòdul de protecció per a motors de corrent continu. Per tant, els objectius del projecte són
• Dissenyar i construir un mòdul de protecció contra sobretensió per a motors de corrent continu amb indicador (LED).
• Dissenyar i construir un mòdul de protecció contra tensió per a motors de corrent continu amb indicador (LED).
• Dissenyar i construir un mòdul de protecció de temperatura per al motor (termistor) amb indicador (LED).
El circuit protegeix el motor de corrent continu de sobretensió i sobretensió. Es podria utilitzar un relé per encendre i apagar la càrrega (motor de 12 V CC). Es fa servir un comparador per detectar si és alt o baix. La sobretensió hauria de ser de 14V mentre que la sobretensió hauria de ser de 10V.
També s'hauria de construir el circuit de rectificació i filtratge necessari.
Quan es detecti alguna de les falles, apareixeran les indicacions necessàries.
A més, quan el bobinatge de camp del motor està obert, el circuit hauria de ser capaç de detectar-ho i apagar-lo perquè, quan el bobinatge de camp està obert, ja no hi ha flux magnètic dins del motor i tota la potència s’alimenta directament a l’armat. .
Això fa que el motor funcioni fins que es trenqui. (Espero que tingui raó?). Estaria agraït de rebre la vostra resposta aviat.
Gràcies Swagatam. Salutacions
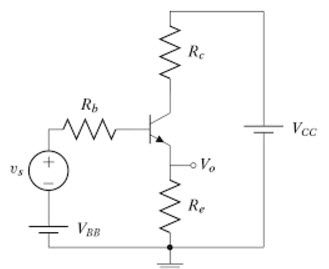
1) Esquema del circuit del mòdul de protecció contra la tensió del motor de CC
El següent tall de baixa i baixa tensió, que vaig comentar anteriorment en una de les meves publicacions, s’adapta perfectament a l’aplicació anterior per protegir els motors de corrent continu de les condicions d’alta i baixa tensió.

Es proporciona tota l'explicació del circuit sobre / sota el circuit de tensió de tall
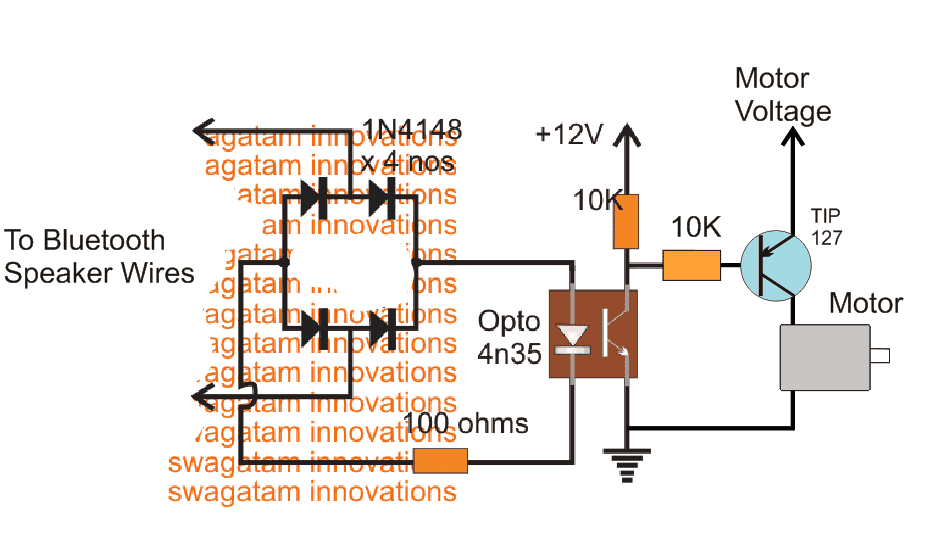
2) Circuit del mòdul de protecció contra la calor del motor de CC
El tercer problema relacionat amb l’augment de temperatura del motor es pot resoldre integrant el següent circuit senzill d’indicadors de temperatura.
Aquest circuit també es va tractar en una de les meves publicacions anteriors.

El circuit de protecció contra la calor anterior no suposarà mai que falli l’enrotllament del camp, perquè qualsevol enrotllament s’escalfarà primer abans de fusionar-se. El circuit anterior apagarà el motor si detecta un escalfament anormal de la unitat i, per tant, evita qualsevol contratemps.
Es proporciona la llista completa de peces i l’explicació del circuit AQUÍ
Com protegir el motor de la sobrecorrent
La tercera idea següent analitza un disseny automàtic de circuits de controladors de sobrecàrrega de corrent del motor. La idea va ser sol·licitada pel senyor Ali.
Especificacions tècniques
Necessito ajuda per completar el meu projecte. Es tracta d’un senzill motor de 12 volts que s’ha de protegir quan es sobrecarrega.
Les dades es mostren i poden ajudar a dissenyar-les.
El circuit de protecció contra sobrecàrregues hauria de tenir components mínims perquè no hi ha prou espai per afegir-lo.
La tensió d'entrada és variable d'11 volts a 13 volts a causa de la longitud del cablejat, però la sobrecàrrega tallada s'hauria de produir quan el V1 - V2 => 0,7 volts.
Vegeu el diagrama de sobrecàrrega adjunt que hauria de tallar-se si els amplificadors augmenten més de 0,7 Amp. Quina idea teniu d’aquest diagrama. És un circuit complicat o cal afegir alguns components?



Anàlisi de circuits
En referència als esquemes de control de corrent del motor de 12V dibuixats anteriorment, el concepte sembla ser correcte, però la implementació del circuit, especialment al segon diagrama, sembla incorrecta.
Analitzem els diagrames un per un:
El primer diagrama explica els càlculs bàsics de l’etapa de control de corrent mitjançant un opamp i uns quants components passius, i té un aspecte fantàstic.
Com s’indica al diagrama, sempre que V1 - V2 sigui inferior a 0,7 V, la sortida de l’opamp se suposa que és zero i, en el moment en què arriba per sobre de 0,7 V, la sortida suposa que serà elevada, tot i que això funcionaria amb un transistor PNP a la sortida, no amb un NPN, .... de totes maneres anem endavant.
Aquí el 0,7 V fa referència al díode connectat a una de les entrades de l’opamp i la idea és simplement assegurar-se que la tensió d’aquest pin excedeixi el límit de 0,7 V de manera que aquest potencial de pinout creui l’altre pin d’entrada complementari de l'amplificador operatiu que genera un activador de commutació OFF per al transistor del controlador del motor connectat (un transistor NPN com es prefereix al disseny)
Tanmateix, al segon diagrama, aquesta condició no s'executarà, de fet el circuit no respondrà en absolut, a veure per què.
Errors en el segon esquema
En el segon diagrama quan s’encén l’alimentació, els dos pins d’entrada connectats a través de la resistència de 0,1 ohms estaran sotmesos a gairebé una quantitat igual de voltatge, però atès que el pin no inversor té un díode de caiguda, rebrà un potencial que pot ser 0,7 V inferior al pin2 d'inversió del CI.
Això provocarà que l'entrada (+) obtingui un voltatge més baix que el pin (-) de l'IC, que al seu torn produirà un potencial zero al pin6 de l'IC just a l'inici. Amb zero volts a la sortida, el NPN connectat no podrà iniciar-se i el motor romandrà apagat.
Amb el motor apagat, no hi haurà corrent pel circuit i no es generarà cap diferència de potencial a través de la resistència de detecció. Per tant, el circuit romandrà inactiu sense que passi res.
Hi ha un altre error al segon diagrama, el motor en qüestió haurà d’estar connectat a través del col·lector i el positiu del transistor per fer efectiu el circuit, un relé pot provocar una commutació o xerrada brusca i, per tant, no és necessari.
Si es fa referència a un relé, el segon diagrama es podria corregir i modificar de la manera següent:

En el diagrama anterior, es poden veure intercanviats els pins d'entrada de l'amplificador operatiu de manera que l'amplificador operatiu sigui capaç de produir una sortida ALTA a l'inici i permetre l'acció del motor. En cas que el motor comenci a treure un alt corrent a causa de la sobrecàrrega, la resistència de detecció de corrent farà que es desenvolupi un potencial negatiu més alt al pin3, reduint el potencial del pin3 que la referència 0,7 V al pin2.
Al seu torn, això revertirà la sortida de l'amplificador operatiu a zero volts apagant el relé i el motor, protegint així el motor de situacions de sobrecàrrega i corrent.
Tercer disseny de protecció del motor
En referència al tercer diagrama tan bon punt s’encén l’alimentació, el pin2 es veurà sotmès a un potencial de 0,7 V menys que el pin3 de l’IC, cosa que obligarà la sortida a pujar al principi.
Amb la sortida elevada farà que el motor s’engegui i guanyi impuls i, en cas que el motor intenti treure un corrent més gran que el valor especificat, es generarà una quantitat de diferència de potencial equivalent a través de la resistència de 0,1 ohms, ara quan comença aquest potencial el pin3 creixent començarà a experimentar un potencial de caiguda i, quan caigui per sota del potencial pin2, la sortida tornarà ràpidament a zero, tallant la unitat base del transistor i apagant el motor instantàniament.
Amb el motor apagat durant aquest instant, el potencial dels pins tendeix a normalitzar-se i es restablirà a l’estat original, que al seu torn engegarà el motor i la situació es mantindrà autoajustada mitjançant un ON / OFF ràpid. del transistor conductor, mantenint un control de corrent correcte sobre el motor.
Per què s’afegeix el LED a la sortida d’amplificador d’op
El LED introduït a la sortida de l'amplificador operatiu pot semblar bàsicament com un indicador normal per indicar la protecció de sobrecàrrega tallada pel motor.
Tanmateix, alternativament fa una altra funció crucial de prohibir que la sortida d’amplificador d’operacions de desplaçament o fuita engegui el transistor permanentment.
Es pot esperar al voltant d'1 a 2 V, ja que la tensió de desplaçament de qualsevol IC 741 és suficient per fer que el transistor de sortida romangui engegat i que la commutació d'entrada tingui sentit. El LED bloqueja eficaçment la fuga o la compensació de l'amplificador operatiu i permet que el transistor i la càrrega canviïn correctament segons els canvis diferencials d'entrada.
Càlcul de la resistència de detecció
La resistència de detecció es pot calcular de la següent manera:
R = 0,7 / actual
Aquí, tal com s’especifica per a un límit de corrent de 0,7 amp per al motor, el valor de la resistència R del sensor de corrent ha de ser
R = 0,7 / 0,7 = 1 ohm
Anterior: Com obtenir energia gratuïta de l’alternador i la bateria Següent: Com funcionen els circuits d'alimentació en mode de commutació (SMPS)