
Introducció:
Ara, moltes indústries del dia utilitzen robots a causa del seu alt nivell de rendiment i fiabilitat i que és una gran ajuda per als éssers humans. La robòtica per evitar obstacles es fa servir per detectar obstacles i evitar la col·lisió. Es tracta d’un robot autònom. El disseny del robot d'evitació d'obstacles requereix la integració de molts sensors segons la seva tasca.
La detecció d’obstacles és el requisit principal d’aquest robot autònom. El robot obté la informació de la zona circumdant a través de sensors muntats al robot. Alguns dispositius de detecció que s’utilitzen per a la detecció d’obstacles, com ara sensors de cops, sensors d’infrarojos, sensors d’ultrasons, etc.

Vehicle Robòtic per Evitar Obstacles
Principi de funcionament:
L’evitació d’obstacles vehicle robotitzat utilitza sensors d’ultrasons per als seus moviments. S’utilitza un microcontrolador de 8051 famílies per aconseguir l’operació desitjada. Els motors es connecten a través del controlador IC del motor al microcontrolador. El sensor d'ultrasons està connectat davant del robot.
Sempre que el robot segueix el camí desitjat, el sensor ultrasònic transmet les ones ultrasòniques contínuament des del cap del sensor. Sempre que es presenta un obstacle, les ones ultrasòniques es reflecteixen en un objecte i aquesta informació es transmet al microcontrolador. El microcontrolador controla els motors esquerra, dreta, posterior, frontal, basat en senyals d'ultrasons. Per controlar la velocitat de cada motor s’utilitza la modulació de l’amplada del pols (PWM).

Diagrama de blocs Vehicle robòtic per evitar obstacles
Diferents sensors utilitzats per evitar obstacles Vehicle robot
1. Detecció d’obstacles (sensor IR):
Els sensors IR s’utilitzen per a la detecció d’obstacles. El senyal de sortida del sensor s’envia al microcontrolador. El microcontrolador controla el vehicle (endavant / enrere / aturat) mitjançant el motor de CC que es col·loca al vehicle. Si hi ha algun obstacle col·locat en línia, el sensor IR no rep els rajos de llum i dóna senyals al microcontrolador. El microcontrolador aturarà el vehicle immediatament i la sirena s’encendrà. Al cap d’un minut, el robot comprovarà l’estat del recorregut si s’elimina un obstacle, el robot es mou molt lluny, en cas contrari, el robot tornarà al lloc inicial. El sensor detecta objectes emetent una ràfega d’ultrasons curta i després escoltant l’eco. Sota el control d’un microcontrolador amfitrió, el sensor emet una petita explosió de 40 kHz. Aquesta explosió s’aventura o viatja per l’aire i impacta contra un article i, després, torna a botar cap al sensor. El sensor proporciona un impuls de sortida a l'amfitrió que finalitzarà quan es detecti l'eco, per tant, l'amplada d'un impuls al següent es pren en càlcul mitjançant un programa per proporcionar resultats a una distància de l'objecte.
2. Detecció de camins (sensor de proximitat):
La causa normal és que els dos sensors que proporcionen les directrius i el robot la segueixen recte pel camí. Quan la línia acaba en aquell moment, el robot inverteix a 180 i torna al mateix lloc.

Estar en línia
Els sensors de proximitat s’utilitzen per a la detecció de camins. Quan no es detecta el sensor dret a la línia de la corba, el microcontrolador activa el motor esquerre per girar a l'esquerra fins al senyal del sensor dret. Un cop detectat el senyal del sensor correcte, els dos motors s’activen per avançar. Quan la línia acaba en aquell moment, el robot inverteix a 180 i torna al mateix lloc.

Perdre la línia
3. Sensor d'ultrasons:
El sensor d'ultrasons s'utilitza per a la detecció d'obstacles. El sensor ultrasònic transmet les ones ultrasòniques des del cap del sensor i rep de nou les ones ultrasòniques reflectides des d’un objecte.
Hi ha moltes aplicacions que utilitzen sensors d'ultrasons com sistemes d'alarma d'instruccions, obridors automàtics de portes, etc. El sensor d'ultrasons és molt compacte i té un rendiment molt alt.

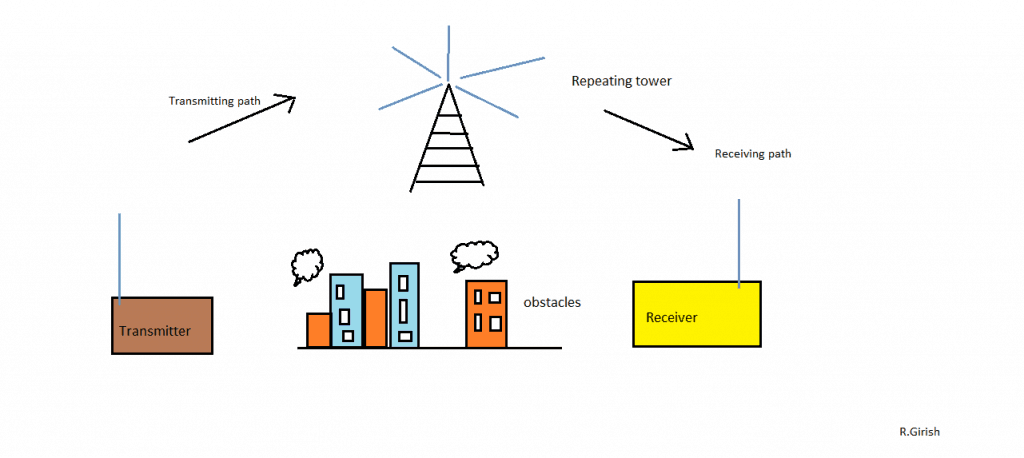
Diagrama general del sensor d’ultrasons
Principi de funcionament:
El sensor d'ultrasons emet el senyal curt i d'alta freqüència. Aquests es propaguen a l’aire a la velocitat del so. Si colpegen qualsevol objecte, reflecteixen un senyal d’eco al sensor. El sensor d'ultrasons consta d'un multivibrador, fixat a la base. El multivibrador és una combinació d’un ressonador i un vibrador. El ressonador proporciona una ona d'ultrasons generada per la vibració. El sensor ultrasònic consta de dues parts: l’emissor que produeix una ona sonora de 40 kHz i el detector detecta una ona sonora de 40 kHz i envia un senyal elèctric al microcontrolador.

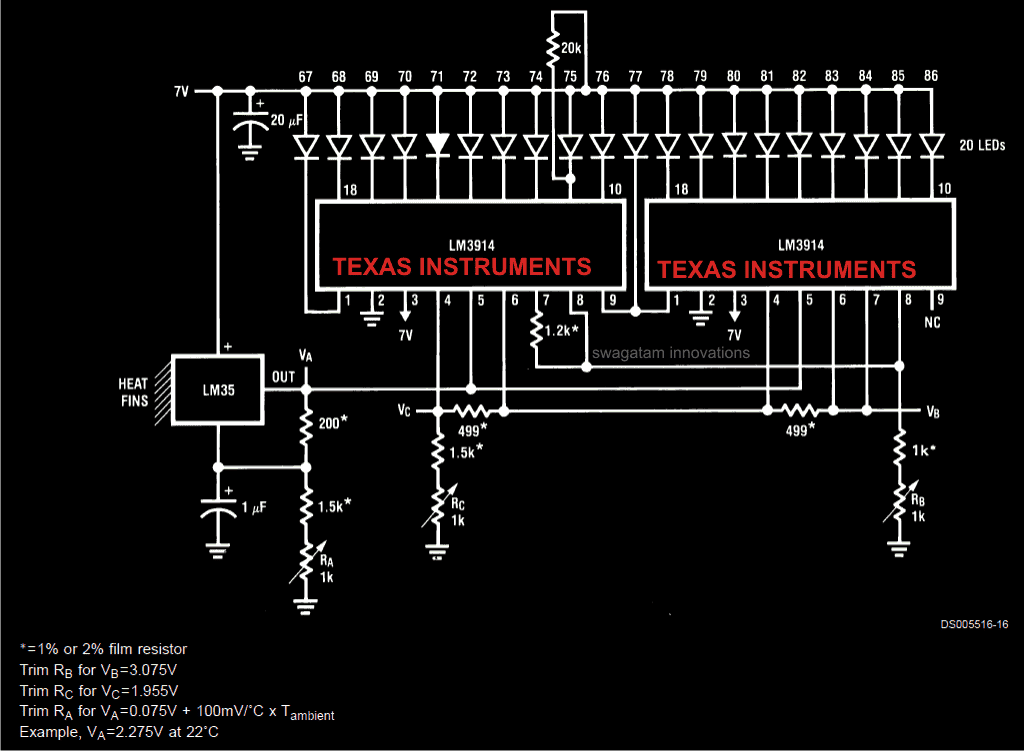
Principi de funcionament per ultrasons
El sensor d'ultrasons permet al robot veure i reconèixer pràcticament un objecte, evitar obstacles, mesurar la distància. El rang de funcionament del sensor d'ultrasons és de 10 a 30 cm.
Funcionament del sensor d'ultrasons:
Quan s’aplica un pols elèctric d’alta tensió al transductor d’ultrasons, aquest vibra a través d’un espectre específic de freqüències i genera una explosió d’ones de so. Sempre que apareix algun obstacle davant del sensor d’ultrasons, les ones sonores es reflectiran en forma de ressò i generaran un pols elèctric. Calcula el temps transcorregut entre l’enviament d’ones sonores i la recepció del ressò. Els patrons d’eco es compararan amb els patrons d’ones sonores per determinar l’estat del senyal detectat.
Nota: El receptor d'ultrasons detectarà el senyal del transmissor d'ultrasons mentre les ones de transmissió impacten sobre l'objecte. La combinació d’aquests dos sensors permetrà al robot detectar l’objecte al seu pas. El sensor d'ultrasons està connectat davant del robot i aquest sensor també l'ajudarà a navegar pel passadís de qualsevol edifici.
Aplicacions del sensor d'ultrasons:
- Canvi automàtic de senyals de trànsit
- Sistema d'alarma d'intrusos
- Comptadors d'accés als instruments de recompte parquímetres
- Sonar posterior d’automòbils
Característiques del sensor d'ultrasons:
- Compacte i lleuger
- Alta sensibilitat i alta pressió
- Alta fiabilitat
- Consum d'energia de 20mA
- Comunicació d'entrada / sortida d'impulsos
- Angle d’acceptació estret
- Proporciona estimacions de separació exactes sense contacte entre 2 i 3 m
- El LED del punt d'explosió mostra estimacions en l'avanç
- La capçalera de 3 pins facilita la connexió mitjançant un enllaç de desenvolupament servo
Aplicacions del vehicle robòtic per evitar obstacles:
- Especialment aplicacions militars
- Es pot utilitzar per a guerres de ciutats
Ara, clarament, es va fer una idea sobre el concepte de vehicle robotitzat mitjançant un sensor ultrasònic de detecció d’obstacles si hi ha més preguntes sobre aquest tema o sobre el concepte de projectes elèctrics i electrònics que deixen els comentaris a continuació.
Crèdit fotogràfic:
- Diagrama general del sensor ultrasònic de Letsmakerobots
- Principi de funcionament del sensor ultrasònic de Microsònic




{kind=link}