Tot i que es poden adquirir circuits de control remot de quadcòpter des del mercat o des de qualsevol botiga en línia, un aficionat als aficionats a l’electrònica mai no pot aprendre com funcionen aquests efectius i si es poden construir a casa?
En aquest article intentarem crear un fitxer circuit de control remot quadcopter senzill utilitzant components discrets i utilitzant mòduls de control remot de RF i sense involucrar els complexos circuits basats en MCU.
La guia pas a pas farà que els aficionats interessats entenguin com es pot controlar simplement un quadcòpter mitjançant un concepte PWM.
Ja ho hem après els conceptes bàsics del quadricòpter , ara anem a investigar una secció de control remot que, en última instància, ajudarà a fer volar la unitat remotament.
Es requereixen mòduls bàsics
Els ingredients principals que es poden requerir per al projecte es donen a continuació:
Es requeriran fonamentalment les següents tres etapes del circuit:
1) Control remot RF de 4 vies Tx, mòduls Rx - 1set
2) Circuits generadors de PWM basats en IC 555 - 4nos
3) Circuits de controladors de motors BLDC - 4nos
Com que és una versió casolana, podem esperar algunes ineficiències amb el disseny proposat, com ara l’absència de joysticks per als controls, que se substitueixen per olles o potenciòmetres, tot i que es pot esperar que la capacitat de treball del sistema sigui igual a la unitats professionals.
La unitat de transmissió PWM de mà constarà bàsicament del mòdul remot Tx integrat amb 4 circuits de control discrets PWM, mentre que el quadcòpter haurà d’estar inclòs amb un circuit Rx integrat amb 4 circuits de controladors BLDC discrets.
Comencem pels circuits del motor quadcopter i veiem com cal configurar i connectar el controlador del motor BLDC amb el circuit Rx.
Circuit receptor Quadcopter PWM
En una de les publicacions anteriors vam aprendre com es podia construir un controlador de motor BLDC versàtil amb un sol xip, tot i que aquest disseny no està dissenyat per operar motors relativament més pesats d’un quadcòpter, per tant potser no sigui adequat per a la present aplicació.
Una opció de 'germà gran' per al circuit anterior està afortunadament disponible i és perfectament adequada per conduir motors quadcopter. Gràcies a TEXAS INSTRUMENTS, per proporcionar-nos aquests meravellosos mòduls de circuits especificats per a aplicacions d’un sol xip.
Per obtenir més informació sobre aquest IC de controlador BLDC d’alta intensitat, podeu consultar la següent fitxa en pdf del mateix
https://homemade-circuits.com/wp-content/uploads/2015/10/slwu083a.pdf
La configuració següent mostra l’esquema complet del circuit del controlador de controlador de motor quadcopter que utilitza l’IC DRV11873, que és un circuit de motor BLDC de baix corrent autònom que consta de totes les característiques de protecció necessàries, com ara protecció contra sobrecàrregues, protecció tèrmica, etc. Aquest mòdul constitueix bàsicament l’ESC per a la nostra unitat de quadcòpters actual.
Per obtenir més informació sobre aquest disseny i detalls del PCB, podeu consultar el document original següent:
http://www.ti.com/lit/ds/symlink/drv11873.pdf

Com funciona
Els pinouts FS i FG de l’IC serveixen per millorar l’IC amb controls afegits a través de circuits externs, ja que no utilitzem aquestes funcions en el nostre disseny, aquests pins es poden mantenir inutilitzats i finalitzar a la línia positiva mitjançant una resistència de 100K.
El pinout RD del CI decideix la direcció de rotació del motor. La connexió d’aquest pin a Vcc mitjançant una resistència de 100K permet una rotació en sentit antihorari del motor mentre es deixa sense connectar, fa el contrari i permet que el motor giri en el sentit de les agulles del rellotge.
El pin # 16 és l'entrada PWM que s'utilitza per injectar una entrada PWM des d'una font externa, variant el cicle de treball del PWM altera la velocitat del motor corresponentment.
Els pinouts FR, CS també són irrellevants per a les necessitats necessàries i, per tant, es poden deixar inutilitzats tal com es mostra al diagrama i finalitzar a la línia positiva mitjançant una resistència de 100K.
Els pinouts U, V, W són les sortides del motor que cal connectar amb el respectiu motor trifàsic BLDC de quadcòpters.
El pinout COM és per connectar el cable comú del motor trifàsic, si el vostre motor no té un cable comú, podeu simular-lo connectant 3 nus de resistències 2k2 als pins U, W, W i, a continuació, unir-los finalitza amb el pin COM de l'IC.
L'esquema també mostra un IC 555 configurat en mode de circuit astable PWM. Això passa a formar part del mòdul del circuit i es pot veure la sortida PWM del seu pin número 7 connectada amb l’entrada PWM del circuit DRV IC per iniciar els 4 motors amb una velocitat de base constant i permetre al motor un vol constant velocitat en un punt determinat.
D’aquesta manera es conclou el circuit ELC principal o el circuit de control BLDC per al disseny de quadcòpters.
Necessitarem quatre mòduls d’aquest tipus per als quatre motors del nostre disseny de quadcòpters.
És a dir, s’han d’associar 4 IC DRV d’aquest tipus juntament amb l’etapa IC 555 PWM a cadascun dels 4 motors del quadcòpter.
Aquests mòduls asseguraran que normalment els 4 motors es configuren a una velocitat predeterminada aplicant un senyal PWM fix i idèntic a cadascun dels circuits integrats de control de DRV corresponents.
Ara anem a saber com es pot modificar el PWM mitjançant un control remot per tal d’alterar la velocitat del motor individual mitjançant un auricular de control remot de 4 canals.
El mòdul del receptor de RF (descodificador PWM)

El circuit anterior mostra el circuit de RF remot del receptor que se suposa que s’allotja dins del quadcopter per rebre dades PWM sense fils externes des del telèfon del transmissor remot de l’usuari i, a continuació, processar els senyals adequadament per alimentar els mòduls de controlador DRV que s’acompanyen, tal com s’explica a la secció apartat anterior.
Les 4 sortides anomenades PWM # 1 ... .PWM # 4 han d'estar connectades amb el pin PWM # 15 de l'IC DRV tal com s'indica al diagrama anterior.
Aquests pinouts PWM de la unitat de receptor de RF s'activen cada vegada que l'usuari prem el botó corresponent al seu auricular transmissor.
Com s'ha de connectar el transmissor de RF (codificador PWM)
A la secció anterior hem comentat el circuit Rx o el receptor remot i com cal connectar les seves 4 sortides amb els mòduls del controlador ESC del motor quadcopter.
Aquí veiem com cal crear i connectar el senzill transmissor de RF amb circuits PWM per transmetre les dades PWM sense fils a la unitat receptora de quadcòpters de manera que les velocitats del motor individual es controlin simplement prement un botó, cosa que en última instància provoca la quadcopter per canviar la direcció o la seva velocitat, segons les preferències dels usuaris.

El circuit mostrat anteriorment mostra els detalls de cablejat del mòdul transmissor. La idea sembla bastant senzilla, el circuit transmissor principal està format pel xip TSW434 que transmet els senyals codificats PWM a l’atmosfera i l’HT12E que es fa responsable d’alimentar els senyals codificats al xip TSW.
Els senyals PWM són generats per 4 etapes de circuits IC 555 separades que poden ser idèntiques a la que es va discutir anteriorment al mòdul de controlador DRV.
El contingut PWM dels 4 circuits integrats es pot veure finalitzat als respectius pinouts del codificador IC HT12E mitjançant 4 botons de discret indicats com SW1 ---- SW4.
Cadascun d'aquests botons correspon i commuta el pinout idèntic del mòdul receptor que hem comentat anteriorment i que hem indicat com a PWM # 1, PWM # 2 ... .. PWM # 4.
El que significa que prement SW1 pot provocar que la sortida PWM # 1 de la unitat del receptor estigui activa i això s'iniciarà en alimentar els senyals PWM descodificats rebuts del transmissor al mòdul DRV associat i, al seu torn, farà que el motor corresponent canviï la seva velocitat en conseqüència.
De la mateixa manera, prement SW2,3,4 es pot utilitzar per influir en les velocitats dels altres 3 motors quadcopter segons el que desitgin els usuaris.
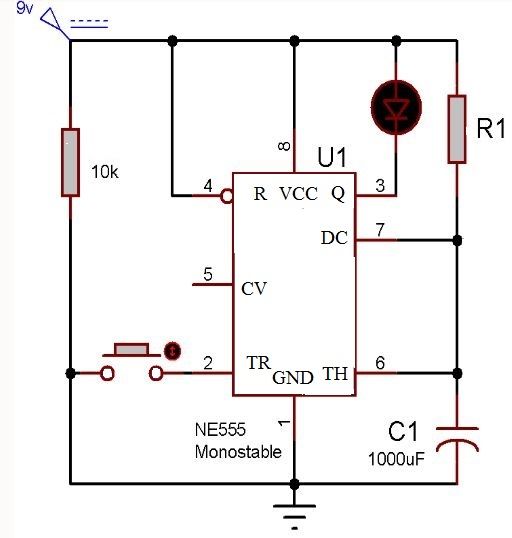
Circuit IC 555 PWM
Els 4 circuits PWM que es mostren a l’auricular del transmissor de RF anterior es poden construir fent referència al següent diagrama, que és exactament similar al que es va veure al nostre circuit ESC del controlador DRV.

Recordeu que el pot 5K podria tenir la forma d’un pot habitual i que aquest pot utilitzar-se addicionalment amb els botons per seleccionar diferents velocitats als motors corresponents.
És a dir, mantenint premut un botó seleccionat i movent simultàniament el 5KPWMpot corresponent, es pot fer que el quadcopter augmenti o disminueixi la seva velocitat en la direcció prevista.
Alternativament, el PWM es podria configurar inicialment en algun nivell superior o inferior i després es premia el botó corresponent per permetre que el motor quadricòpter corresponent aconseguís la velocitat preferida, segons el paràmetre PWM.
Especificació del motor quadricòpter
El circuit de control remot Qiadcopter explicat anteriorment està pensat per utilitzar-se únicament amb fins de visualització i no es pot utilitzar per aixecar càrregues ni per a càmeres. Això implica que els motors utilitzats en el disseny haurien de ser preferentment de tipus baix corrent.
El DRV11873 IC està dissenyat per utilitzar motors de 15 V, 1,5 amperes o uns 20 watts ... de manera que es pot utilitzar qualsevol motor BLDC trifàsic de 15 a 30 watts.
La bateria d’aquest disseny de quadcòpters pot ser qualsevol bateria de ions Li-Lipo de 12v capaços de subministrar un pic de 15V a 1,5 amperes de corrent continu.
Detalls de l’especificació
Motor de corrent continu miniatura 1306N Brushless Outrunner
Tipus: Micromotor
Construcció: imant permanent
Commutació: sense escombretes
Velocitat (RPM): 2200 rpm / v
Corrent continu (A): 1,5 ~ 2,6A
Voltatge (V): 7,4 ~ 11,1V
motor de corrent continu en miniatura: AX-1306N
pes: 8 g
diàmetre de l'eix: 1,5 mm
Bateria LI-PO: 2-3 segons
Corrent de funcionament: 1,5 ~ 2,6A
eficiència màxima: 67%

Anterior: Circuit de controlador de motor BLDC sense sensor Següent: Circuit del controlador de l'escalfador mitjançant botons de pressió