El missatge parla d’un circuit de control remot per helicòpter RC que utilitza mòduls RF de 433 kHz, sense cap microcontrolador ni implementacions complexes de joystick.
La idea va ser sol·licitada pel Sr. Jitendra.
Objectius i requisits del circuit
- Estic fabricant un helicòpter RC a gran escala. En què estic fent servir 4 motors. Per al primer motor principal de 12v: el mecanisme és que vull que la seva velocitat sigui controlada per una tecla de control del comandament a distància, de 0 a velocitat màxima.
- Per a motors de 2v 3v: el seu mecanisme només és per a la rotació cap endavant i cap enrere amb clau individual al comandament per a cada motor, ja que farà funcionar les plaques de rotació.
- Per al motor de cua de 3r de 9v: s’hauria d’establir a una velocitat d’equilibri mitjançant un regulador a la placa receptora de l’helicòpter, de manera que pogués ajustar la velocitat manualment per aturar l’helicòpter .. de girar juntament amb els rotors, i hi ha una clau al remot seria frenar i accelerar el motor des del seu equilibri.
- La potència d'entrada a la placa del receptor seria de 12 V i el corrent de 8-10 amperes. Ha d’ésser de 500-800 metres. Senyor, si us plau, podeu dissenyar una placa de circuit RC així com el comandament a distància.
- Estic a la recerca d’aquesta placa de circuits des dels darrers dos anys.
- El meu projecte es va aturar a causa de la seva absència. Senyor, si us plau, ajudeu-me. Per a la vostra comoditat, podeu dissenyar dues plaques de circuit rc individuals, una per al motor principal i el motor de cua i una altra per a dos motors rotatius cap endavant i cap enrere.
- Però el corrent d'entrada i la diferència de potencial en tots dos circuits haurien de ser iguals, amb el mateix abast que és de 500 a 800 metres amb els seus comandaments a distància o remots. Esmenta també el nom dels components necessaris amb la numeració.
El disseny
Els mòduls de circuit sol·licitats que són necessaris per construir l’helicòpter RC proposat són:
1) Un controlador de velocitat variable PWM de 12V
2) Un circuit de control invers del motor invers de 3V.
3) un regulador de motor de 9V amb un circuit de control de velocitat variable.
Totes les especificacions anteriors s'han de controlar mitjançant un llarg abast de 433 MHz Mòdul de control remot RF .
El mòdul remot de 433 MHz desitjat es pot adquirir des de qualsevol botiga en línia o des del vostre distribuïdor electrònic més proper. L'abast del control remot hauria de ser segons les especificacions requerides per a la gamma d'helicòpters RC, aquí se suposa que està a menys d'1 km.
Per al comentat circuit de control remot d’helicòpter RC, caldria un mòdul remot RF de 6 canals, exactament similar al que es feia servir per al nostre anterior circuit de control remot de dron més senzill .
A continuació es pot veure la imatge de la mateixa:

El tauler verd del costat esquerre és el mòdul del receptor remot que té els sis relés de control i cal instal·lar aquestes unitats a l’interior de l’helicòpter RC per a les operacions de control necessàries.
La unitat lateral dreta és l’auricular del transmissor que se suposa que ha de mantenir l’usuari i es premen els botons corresponents per comandar la placa de relés amb la informació de control de moviment corresponent.
Ara vegem com cal configurar els sis relés amb els diversos circuits PWM i instal·lar-los a l'interior de l'helicopter RC, a partir dels detalls següents:
Recordeu que els contactes de retransmissió que es mostren a la placa de recepció estan en blanc per defecte, és a dir, que els seus contactes N / C i N / O no estan connectats i s’han de connectar tal com es mostra als diagrames següents.
Segons la sol·licitud, el motor de 9V i la velocitat del motor de 12V han de ser controlats mitjançant la prement posterior del telèfon remot. Els circuits per implementar aquesta funció es mostren a continuació:
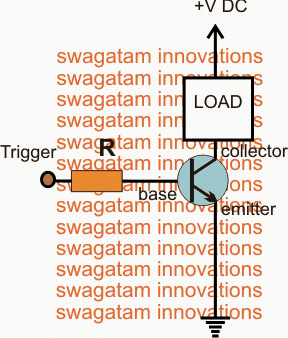
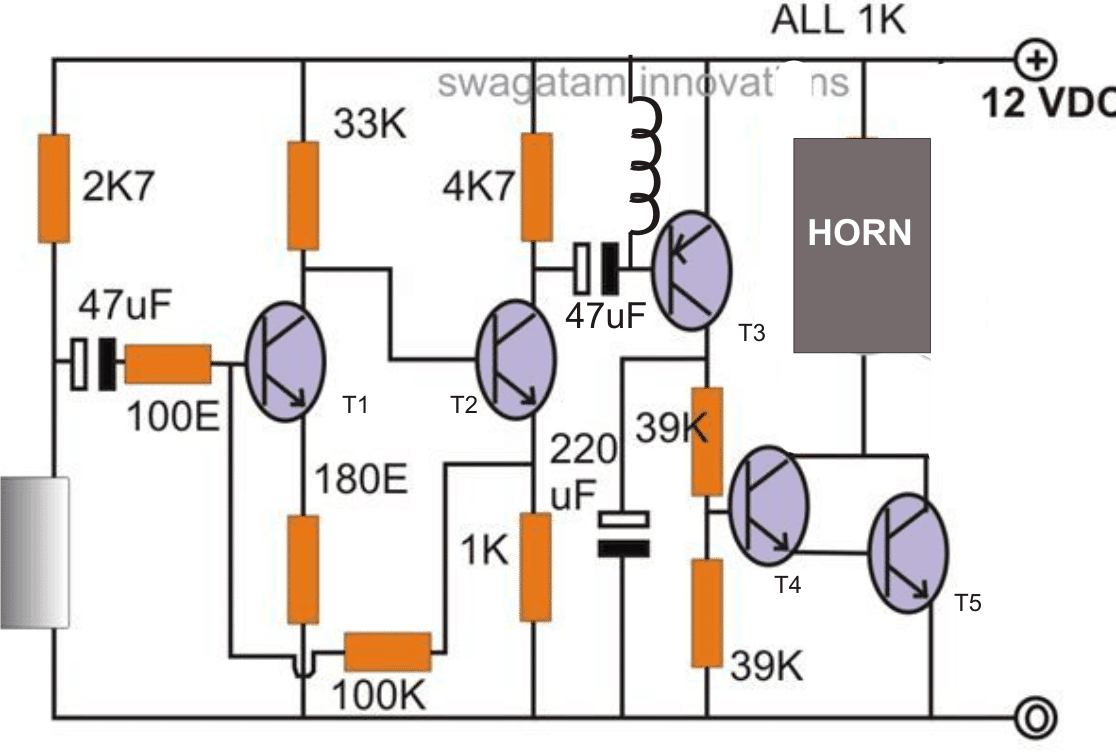
Esquema del controlador de motor


Funcionament del circuit
Com es pot veure als esquemes, un parell d’idèntics Circuits IC 555 PWM s’utilitzen a l’efecte. Quatre dels sis relés es comprometen aquí amb els seus contactes rellevants connectats a través de les connexions mostrades.
En el disseny el IC 555 està equipat com un circuit bàsic astable, assignat a oscil·lar amb certa freqüència especificada depenent dels seus valors de components R1, R2 i C .
Un seguidor de tensió en forma d'IC 741 està configurat amb el pin de control # 5 de l'IC 555 per tal de variar el contingut de PWM al pin # 3 de l'IC 555 d'acord amb les operacions de relé indicades.
El voltatge al pin # 3 de l'IC 741 se segueix o es transfereix al pin # 6 i posteriorment al pin # 5 de l'IC 555. Depenent del nivell de càrrega del condensador del pin # 3, aquest voltatge variable podria estar entre el límit de tensió d'alimentació i zero.
El nivell de càrrega del condensador es varia o es canvia simplement carregant-lo o descarregant-lo mitjançant l’activació del contacte de relé corresponent. Per carregar el contacte del relé superior es tanca o s’activa permetent una pujada de tensió al pin # 5 de l’IC 555 mentre que l’activació dels contactes del relé inferior descarrega el condensador fent que aparegui un voltatge proporcionalment inferior al pin # 5 de l’IC 555.
Les accions anteriors tradueixen els resultats del pin núm. 3 en PWM que corresponen, cosa que al seu torn fa que el motor funcioni més ràpid o més lent.
Des del motor de 9V es poden veure una sèrie de díodes connectats a l’emissor del transistor del controlador, cosa que assegura la caiguda de tensió necessària i ajuda a convertir el 12V en un subministrament regulat aproximat de 10V segons les especificacions del motor.
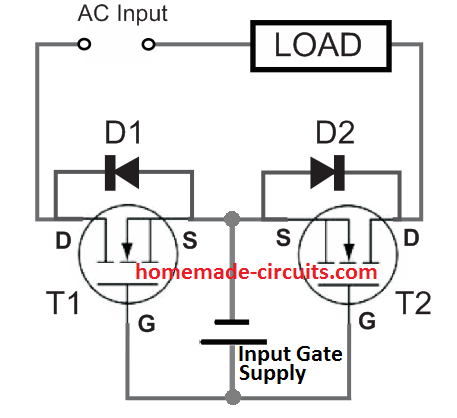
Operació cap endavant inversa del motor de 3V
La tercera i última demanda de la sol·licitud és per al control invers / endavant del motor de 3V mitjançant el botó del telèfon del transmissor RF.
Els dos relés restants ara es poden utilitzar per a aquesta execució en particular, i es fa tal com es demostra al següent diagrama:

Aquí també fem servir el versàtil IC 555 cablejat com a circuit de generador de PWM precís. El PWM es configura adequadament a través del preajust 5K abans de finalitzar les instal·lacions de manera que la velocitat del motor s’ajusti perfectament a l’equilibri requerit de l’helicòpter.
Els relés es poden veure simplement connectats per fer efectiu el moviment invers invers i cap endavant o en sentit horari o antihorari per al motor en resposta a la commutació del contacte de relé aparellat, que junts formen un relé DPDT.
Per tal d’evitar un curtcircuit, preferiblement s’hauria de modificar el mòdul receptor per a aquests dos relés de manera que, si premeu qualsevol dels botons, els dos relés s’activessin junts, en lloc de bronzejar-se, depenent de dos commutadors que s’hagin de sincronitzar per a l’activació.
Es pot esperar que aquesta commutació capgiri la rotació del motor en la direcció oposada a l’instant permetent a l’usuari executar els canvis de direcció necessaris a la màquina d’helicòpter RC.
D’aquesta manera es conclouen les instruccions de cablejat del circuit i del relé per al circuit de control remot proposat per helicòpter RC; per a més dubtes, no dubteu a expressar-les mitjançant els vostres comentaris.
Anterior: Circuit d’interruptor ON / OFF automàtic intel·ligent per ultrasons Següent: Circuit amplificador de potència MOSFET de classe A.




![Díodes de punt de contacte [història, construcció, circuit d'aplicació]](https://electronics.jf-parede.pt/img/electronics-tutorial/38/point-contact-diodes-history-construction-application-circuit-1.jpg)