A la publicació es parla d’un mecanisme d’engranatges sense fi autoblocant per a l’elevació de càrregues pesades a través d’un motor elèctric. La característica principal del sistema és el seu autoblocatge en cas de fallada del motor. La idea va ser sol·licitada pel senyor Amit Patkar.
Especificacions tècniques
M'encanta l'electrònica, sobretot l'automatització, he estat fent coses utilitzant kits de lamington road. però com que no tinc cap formació formal ni formació en electrònica / enginyeria, em quedo atrapat.
M'encanta que l'automatització sigui perquè sóc mandrós, però segueixo rebent idees. Mentre buscava algun disseny que s’ajustés a la meva necessitat al web i, per sort, vaig arribar a la vostra pàgina. Espero que em pugueu suggerir alguna bona idea.
Ens allotgem a la tercera planta d’un antic edifici de disseny, sense ascensor. Si mantinc els meus cicles i els meus fills a la planta baixa, són propensos a ser robats i tinc mal d’esquena i és difícil portar cicles de 3 pisos cada vegada que algú de nosaltres necessiti muntar. També consumeix zona de catifes de la casa.
Requisit
Tinc una graella forta on es pot fixar un mecanisme de politja. que es pot utilitzar amb control remot.
1) Moviment horitzontal de la vareta per col·locar la politja a 3 peus de distància de l'estructura de l'edifici per evitar danys a qualsevol cobert de finestres.
2) Moviment vertical només en prémer el botó remot. Parar quan es deixa anar el botó. D’aquesta manera s’evitarà un accident accidental.
3) Recollida a base de goma, pot posar una jaqueta de goma als ganxos. Per evitar danyar la pintura.
4) Quan es tira verticalment cap amunt i cap enrere horitzontalment. Es pot fixar en ganxos manuals addicionals, per evitar pressió sobre la politja.
5) si es fabrica algun tipus de base, es pot utilitzar per transportar coses comprades a Dmart. HaHa.
fes-me saber les teves opinions.
Gràcies
Amit Ramakant Patkar.
Navi Mumbai.
El disseny
La idea sol·licitada sembla més mecànica per naturalesa que electrònica, de manera que es fa imprescindible parlar primer de la part mecànica amb deteniment.
El mecanisme d’elevació de bicicletes teledirigit proposat necessita una característica molt important que s’inclogui al sistema, que és òbviament necessària per a la majoria de mecanismes d’elevació basats en politges, és la característica d’auto-bloqueig per evitar el desenrotllament invers de la politja en cas de fallada del motor.
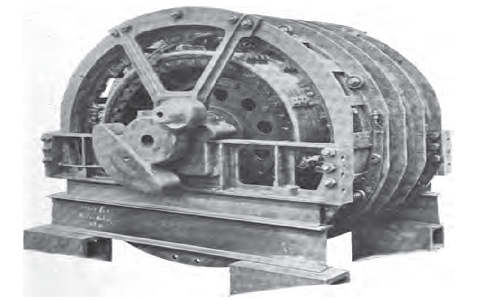
Emprant un mecanisme d’engranatges de cuc
Una manera molt eficaç d’implementar la funció d’auto-bloqueig és emprant un sistema d’engranatges de cuc, com es pot veure a la imatge següent.

Aquí veiem un eix horitzontal en forma de broca en forma de broca amb les dents bloquejades a les dents d’una roda dentada circular normal.
Ara, a mesura que l'engranatge en espiral gira a través d'un motor, les seves dents tendeixen a empènyer-se i rodar en el moviment cap endavant empenyent les dents de l'engranatge circular en la mateixa direcció, donant lloc a una rotació sincronitzada de l'engranatge circular inferior.
L’engranatge circular és el que s’utilitza per aixecar o moure la càrrega i, en cas que el motor falla a causa d’una fallada d’alimentació o per qualsevol altre mal funcionament, l’engranatge en espiral s’assegura que les dents de l’engranatge circular queden bloquejades a través de les dents de l’engranatge en espiral i es converteixen en gairebé immòbil en aquestes situacions.
Aquest principi és el que fa que un sistema d’engranatges de cucs sigui el més desitjable per al mecanisme d’elevació de bicicletes proposat.
El següent diagrama mostra el mètode en què es podria implementar el mecanisme d'engranatges sense fi explicat anteriorment entre suports paral·lels i amb l'ajut de dos conjunts de corda i politja adjacents.
Segons una simulació visual, es pot comprovar que quan s’activa el motor, el conjunt d’engranatges comença a moure’s en una determinada direcció predeterminada de manera que la càrrega s’estira cap amunt mitjançant l’enrotllament de la corda al voltant de les dues politges adjacents. la direcció es capgira.
La vareta central que es podria veure recolzada (pivotada) sobre estructures fermes a banda i banda s’ha de millorar amb anells de rodament de boles segellats per tal de facilitar una rotació suau de tot el sistema.

Com utilitzar el control remot de RF per al mecanisme
A la discussió anterior es va explicar com s’ha de fixar el mecanisme d’elevació de politges, a continuació, segons la petició, es vol controlar el motor mitjançant un circuit de control remot.
Avui en dia els mòduls remots de RF es poden adquirir de manera senzilla i econòmica a les botigues electròniques locals, per la qual cosa es recomana comprar-ne un en lloc de provar de fabricar-ne un.
Podeu llegir-ne més informació en aquest POST
Per als entusiastes del nucli dur que vulguin construir-ho tot amb les seves pròpies mans, es descriu un disseny de circuit relacionat en aquest POST
En cas que hagueu adquirit els mòduls Rx, Tx preparats, trobareu les unitats Rx receptores d’aquests mòduls RF que tenen relés integrats, però aquests relés podrien ser bastant inferiors amb la seva capacitat de maneig de càrrega i, per tant, s’haurien de reforçar amb relés externs, especialment quan la és un tipus de corrent alt com en la present aplicació.
Preferiblement, compreu un mòdul RF de dos relés perquè només necessitem dos relés per controlar els moviments inversos del motor. A la imatge següent es pot veure un exemple clàssic d’un mòdul de dos relés.

Mòdul receptor Rx

Transmissor Mòdul de telèfon Tx
Els relés inclosos al PCB Rx funcionaran en resposta a la pressió dels botons corresponents del mòdul transmissor Tx, de manera que es tracta de traçar els N / O, N / C i els pols d’aquests dos relés i connectar-los amb els relés externs de càrrega pesada per fer complir els moviments de marxa inversa del motor desitjats.
El següent diagrama detalla de manera exhaustiva la disposició del cablejat dels relés, un cop finalitzat el cablejat segons el diagrama mostrat, un dels botons farà que el motor giri en sentit horari mentre es prem l’altre capgirarà la direcció del motor en sentit antihorari.

Quan no hi ha botons en funcionament, el motor faria papereria. El motor enrotllaria o desenrotllaria les cordes de la politja sempre que l’usuari mantingui premuts els botons corresponents del Tx i s’aturaria un cop alliberats.
Alternativament, podeu provar de jugar amb les connexions del selector d’operació de relés dels mòduls Rx incorporats inserint els endolls de manera adequada fins que es trobi l’especificació necessària, en què es permet que el relé commuti ON / OFF amb cada pulsació alternativa dels botons Tx i l'usuari no ha de mantenir premut el botó Tx corresponent per executar les rotacions del motor previstes.
Anterior: Circuit de controlador de bufador d’aire PWM per a estufes de cuina de biomassa Següent: Què s’utilitza a GTI (inversor de graella)