Una introducció als robots
El robot és una màquina que s’assembla a éssers humans. Això s’ha programat per fer alguna cosa. La paraula Robot prové de la paraula eslava robota (que significa treballador forçat). El robot es va desenvolupar a la dècada de 1960. Els robots estan fets de metalls i mescladors d’altres elements. Els robots només manen i el que diuen els humans. Fa trenta anys, els robots eren alguna cosa d’una pel·lícula de ciència ficció. Però avui la robòtica s’utilitza en moltes àrees. I és molt important per al futur de la humanitat. El tecnologies robòtiques contribueixen a la defensa nacional, l’assistència sanitària, la fabricació, la seguretat nacional, l’educació, els béns de consum i molts sectors diferents. Els metges ja utilitzen la robòtica en cirurgies especials. Els robots són importants perquè realitzen tasques tan perilloses com impossibles per als humans.
5 raons per les quals els robots han estat populars
- Velocitat
- Entorns perillosos
- Tasques repetitives
- Eficiència
- Precisió
Velocitat:
Es poden utilitzar robots perquè són més ràpids que les persones en la realització de tasques. El robot és realment un mecanisme controlat per un ordinador. Sabem que els ordinadors poden fer càlculs i processar dades molt ràpidament en comparació amb els éssers humans. Alguns robots realment es mouen més ràpidament realitzen una tasca, com ara recollir i inserir articles, més ràpidament que els humans.
Entorns perillosos:
Es pot utilitzar un robot amb un entorn perillós perquè pot treballar en un lloc on un ésser humà estaria en perill. Per exemple, el robot es pot dissenyar per suportar una major quantitat de calor, radiació i fums químics que els humans.
Tasques repetitives:
Algunes vegades els robots no són molt més ràpids que els humans, però són bons simplement fent la mateixa feina una i altra vegada. Això és fàcil per al robot, ja que un cop programat el robot per fer una feina una vegada, el mateix programa es pot executar moltes vegades per dur a terme la feina moltes vegades. I el robot no s’avorrirà com ho faria un humà.
Eficiència:
L’eficiència consisteix en realitzar tasques sense malbaratament. Això significa
- No perdre el temps
- No malgastar materials
- No malgastar energia
Precisió:
La precisió consisteix en realitzar tasques amb molta precisió. En una fàbrica que fabrica articles, cada article s’ha de fabricar de la mateixa manera. Quan s’estan muntant articles, un robot pot col·locar parts dins d’una fracció de mil·límetre.
Controlar un robot
Un robot bàsic o un sistema robotitzat consisteix en un cos rígid que alberga tot el circuit del robot. El circuit consta de sensors que detecten qualsevol canvi en l’entorn i que transmeten aquesta informació a la unitat de control.
Basat en l’entrada dels sensors, la unitat de control controla els actuadors en conseqüència. Per tant, el funcionament principal del robot rau en la unitat de control. En algunes aplicacions, el robot és completament automàtic, és a dir, el control es troba dins del propi dispositiu i, basat en alguna unitat de sensor, els actuadors són controlats automàticament per la unitat de control. En algunes aplicacions, el robot es controla manualment.
Vegem dues maneres de controlar un robot manualment
- Utilitzar un telèfon mòbil
- Ús d’un comandament a distància de TV
Vehicle robotitzat controlat per telèfon mòbil:
Quan en parlem vehicles robot sense fils , generalment pensem en circuits de tecnologia RF. Però aquest projecte és molt diferent. Utilitza un telèfon mòbil per controlar el moviment del vehicle robòtic. Aquí hem utilitzat la tecnologia DTMF per controlar el vehicle robotitzat mitjançant el telèfon mòbil. Hem utilitzat dos telèfons mòbils, un està connectat al robot i un altre és el telèfon de l'usuari. La comunicació s’estableix entre aquests dos mòbils i, si es prem una tecla, aquest to s’escolta a un altre extrem de la cel·la. Aquest to s’anomena to “doble to multi freqüència” (DTMF).

Vehicle robotitzat controlat per telèfon mòbil

Esquema de circuits de vehicles robòtics controlats per telèfon mòbil
Aquest projecte està dissenyat per desenvolupar un vehicle robotitzat que està controlat pel telèfon mòbil. Es basa en el microcontrolador 8051. Els dos telèfons mòbils controlen el robot segons els requisits. Un telèfon mòbil està connectat al robot i un altre és el mòbil d’usuari. Quan es prem una tecla del telèfon mòbil de l'usuari que genera el to corresponent, es rep en una altra cel·la. El to rebut és processat pel microcontrolador amb l'ajut del descodificador DTMF. El descodificador descodifica el to DTMF en dígits binaris i aquestes dades codificades binàries s’envien al microcontrolador. Basant-se en l’entrada del telèfon mòbil, el microcontrolador, en conseqüència, dóna senyals adequades al controlador del motor perquè giri cadascun dels motors en la direcció desitjada. Per exemple, en prémer un número concret al mòbil de l'usuari, la trucada es marcarà automàticament al telèfon mòbil del sistema. El sistema mòbil està connectat al descodificador DTMF que, en conseqüència, descodifica el to i el motor gira en la direcció corresponent al número premut.
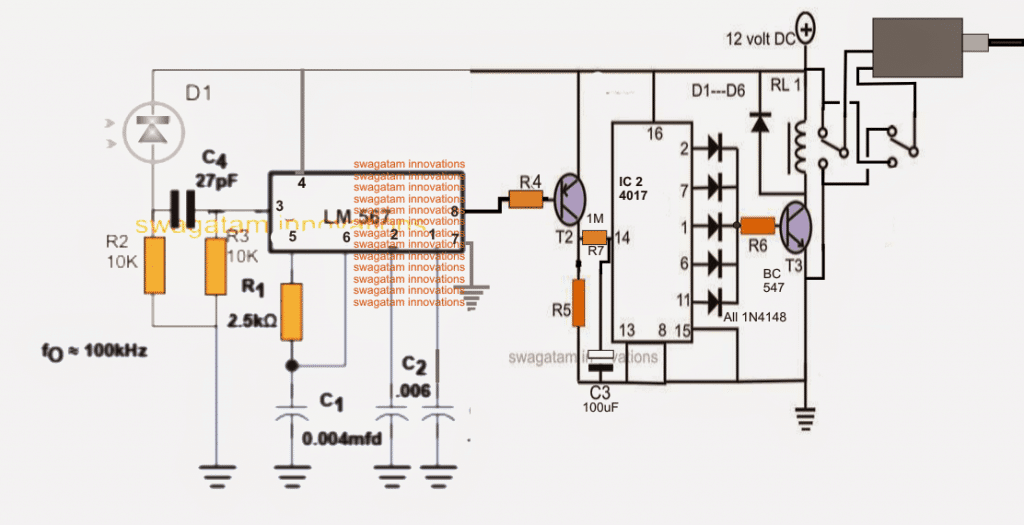
Vehicle robòtic controlat per IR:
En aquest sistema, principalment un vehicle robotitzat està controlat pel comandament del televisor. El sensor d'infrarojos (IR) està connectat a la unitat de control del robot per detectar el senyal remot. Aquesta informació es transmet a la unitat de control que mou el robot segons el requisit. S'utilitza un microcontrolador com a sistema de control.
En aquest comandament a distància IR funciona com a transmissor. Quan es prem el botó al comandament a distància, el senyal serà passat i guanyat pel receptor IR. Aquest signe s’envia al microcontrolador que descodifica el senyal i realitza el moviment relacionat segons el botó premut al comandament. Per exemple, si es prem el número 1 al comandament, el robot es girarà a l'esquerra segons el nostre requisit. La prova d’altres empreses (endavant, enrere i dret) es realitzarà de manera comparativa mitjançant IR. A l'extrem receptor, el desenvolupament s'aconsegueix mitjançant dos motors que estan connectats al microcontrolador.
El programa està escrit, és a dir, mentre s’executa envia ordres al controlador IC del motor segons el seu requisit per fer funcionar el motor per al moviment del robot tal com s’ha explicat anteriorment.

Diagrama de blocs de vehicles robòtics controlats per IR
Si teniu dubtes sobre aquest article, deixeu un comentari. I feu-me saber més aplicacions i mètodes relacionats amb això?