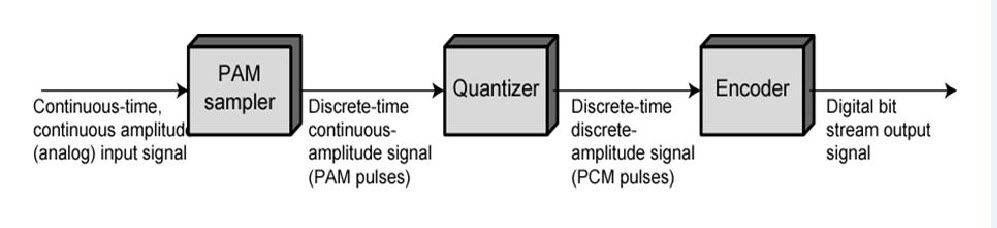
En aquest post investigem què és un motor BLDC i, posteriorment, ens assabentem del disseny d’un circuit de controlador de motor BLDC sense sensor.
Ventiladors de CPU BLDC
Heu vist aquests ventiladors que es mouen ràpidament a les CPU, estabilitzadors de tensió, reproductors de DVD i altres equips similars, que funcionen amb la màxima eficiència, que consumeixen un mínim d’espai, actuals i, però, són capaços de realitzar les operacions importants que s’estipulen per a l’equip concret?
Sí, aquestes són totes les versions modernes dels ventiladors BLDC o dels motors CC sense escombretes que són molt superiors als antics motors raspallats tradicionals.

Cortesia de la imatge: https://en.wikipedia.org/wiki/Computer_fan#/media/File:Geh%C3%A4usel%C3%BCfter.jpg
No obstant això, un motor BLDC requerirà un circuit de control sofisticat, i sí, tots aquests ventiladors de CPU contenen aquests mòduls de controladors incorporats, tot i que semblen fàcilment operables mitjançant un corrent continu normal, el sistema ja està equipat amb un circuit intel·ligent.
Controlador de motor BLDC
Aquí coneixerem un d’aquests circuits de controladors de motors BLDC intel·ligents, amb un sol xip DRV10963 per conduir qualsevol motor BLDC petit amb una eficiència increïble i, més endavant, en un dels propers articles veurem com es pot actualitzar aquest circuit IC per conduir fins i tot els potents BLDC de gran corrent com els que són s’utilitza en quadcòpters.
Abans, però, seria interessant conèixer una mica els motors BLDC.
Diferència entre motors CC sense escombretes i sense escombretes
La diferència entre un motor raspallat i un motor sense escombretes i la velocitat d’eficiència és força evident.
Atès que els motors raspallats tenen la mateixa armadura de la ferida que es mou entre els imants, ha d’emprar “escombretes” (contactes de fregament) de manera que els terminals de la bobina en moviment siguin capaços de rebre la tensió d’alimentació constantment sense haver d’arribar a la font d’alimentació ells mateixos, cosa que d’altra manera treballant impossible i posant en perill les operacions.
En un motor sense escombretes, la bobina o el bobinatge no es mou mai i són constants, aquí el rotor porta un conjunt d’imants permanents i gira per influència dels fluxos magnètics del bobinatge circumdant.
Com que l’imant està lliure de totes les molèsties i és capaç de treballar sense que els terminals siguin necessaris per gestionar o rebre energia, es pot fer sense esforç, girant a una velocitat ràpida i pràcticament a un nivell sense sorolls.
Però hi ha un problema aquí. Per fer que un electroimant respongui als fluxos d’un imant permanent, cal que hi hagi un desplaçament constant de la fase o pols magnètics, de manera que les dues contraparts puguin reaccionar constantment i passar per una força oposada alliberant la força de torsió necessària sobre la rotor i executar la rotació amb el parell resultant.
En un motor raspallat, això es fa més fàcil a causa de la naturalesa d’ajustament de la bobina d’armadura, que és capaç de girar i crear una força magnètica oposada autosostenible i seguir girant sense necessitat de cap impuls o processament extern.
Tanmateix, en un BLDC, això es converteix en un problema, ja que el rotor de l’imant es manté “despistat” i requereix un comandament magnètic calculat des del bobinatge per tal de girar d’una manera significativa i no de manera atzarosa.
És per això que tots els motors BLDC requereixen obligatòriament un circuit de controlador de motor per comandar els tres conjunts diferents de bobinatge dins del motor.
Per tant, tots els BLDC són essencialment motors trifàsics i requereixen obligatòriament 3 fases per produir el parell de rotació del rotor.
Què fan els controladors BLDC sense sensor
El circuit de control sense BLDC sense sensor simplement electrifica els 3 conjunts de bobinatge de manera seqüencial de manera que el rotor magnètic sigui capaç de passar per una força oposada consistent que permeti al motor aconseguir un parell i una força de rotació sostinguts.
Però aquesta alimentació seqüencial del bobinat BLDC pel circuit no es pot configurar aleatòriament, ha de fer-se en tàndem o en resposta a la posició de rotació de l’imant del rotor, en cas contrari, la implementació es podria enfonsar i podem assistir a l’eix del motor (rotor). ) girant aleatòriament, és a dir, sacsejant entre un sentit de les agulles del rellotge i un antihorari sense rotació sensible.
Per què s’utilitzen els sensors als motors BLDC
Per tant, introduïm sensors situats dins de moltes variants de motors BLDC, aquests sensors (normalment els sensors d’efecte Hall) “entenen” la posició canviant dels pols magnètics de l’imant del rotor, donen instruccions al circuit del processador adjunt per electrificar el bobinatge corresponent i executar un moviment de rotació amb un parell òptim.
Els sensors d’efecte Hall s’utilitzen eficaçment en la majoria dels motors BLDC que tenen una mida relativament més gran, però per a motors més petits, com ara en ventiladors de CPU, unitats de CPU, reproductors de DVD, en petits ventiladors d’escapament, per als motors utilitzats en quadcòpters, els sensors d’efecte Hall poden esdevenir inadequats. i, per tant, s’implementa un enfocament alternatiu menys sensori.
Això implica l'explotació de l'electricitat EMF posterior inherent del bobinatge que es pren com a font de referència per processar i electrificar els conjunts de bobinatge pertinents i executar el parell de rotació.

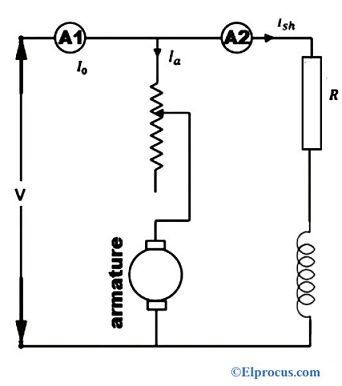
Simulant un moviment del rotor BLDC
A la simulació del cru anterior, podem visualitzar com es pren la CEM retrocedida alliberada com a referència i s’utilitza per produir els polsos de seqüenciació per als conjunts posteriors de bobinatge, imposant un parell de rotació al rotor d’imant permanent central. La simulació pot no ser la replicació exacta, tot i que dóna una idea aproximada del principi de funcionament.
És interessant assenyalar que el pols es commuta quan el N / S de l’imant es troba exactament al centre del nucli del bobinatge, cosa que permet que el bobinat s’energia com a N o S en funció de la polaritat del pols i produeixi una atracció i repel·lència força sobre els imants N / S, generant així el parell requerit al màxim nivell possible.
I això al seu torn es fa possible a causa de la CEM posterior alliberada mitjançant la commutació de la bobina anterior.
La discussió anterior aclareix el funcionament d'un motor sense sensor BLDC, ara aprenem com un circuit especificat gestiona l'execució complexa anterior d'una commutació trifàsica
Controlador BLDC DRV10963
Després d'alguns Googling, he trobat aquest circuit de controladors BLDC sense sensor que utilitza un sol xip DRV10963 que utilitza una quantitat insignificant de peces a la configuració, però que és capaç d'implementar un processament sofisticat per a les accions previstes.
El DRV10963 és un xip d’última generació dissenyat específicament per accionar motors sense BLDC sense cap mena d’anticipació de la CEM posterior del bobinatge del motor i lliurant un comandament precís sobre el bobinat i aconseguint un parell de rotació òptim sobre el rotor.
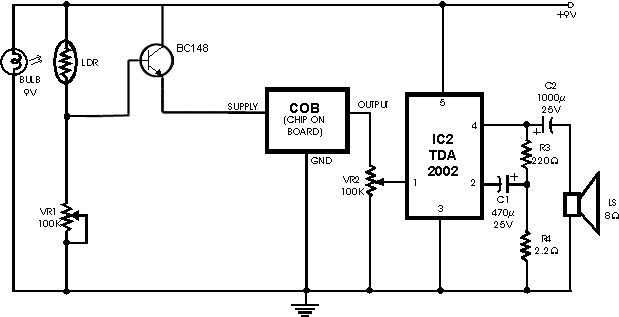
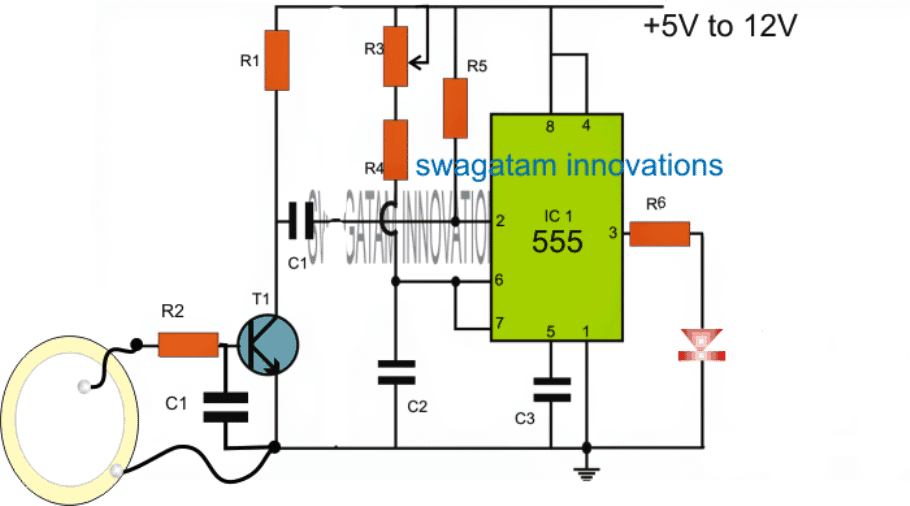
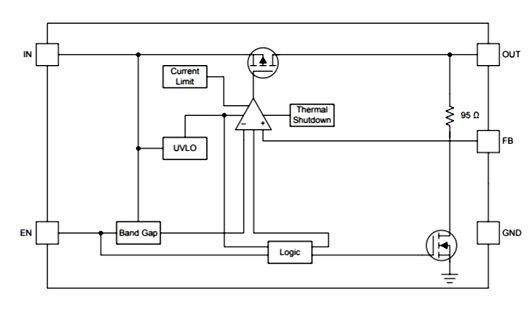
Esquema de connexions

La imatge anterior mostra la disposició senzilla del circuit que aparentment no inclou res més que la pròpia IC.
Els diversos pinouts s’assignen per dur a terme les funcions especificades, com ara el control de velocitat PWM del motor, el control de direcció, etc. simplement alimentant els pinouts rellevants amb les dades especificades des d’una font externa.
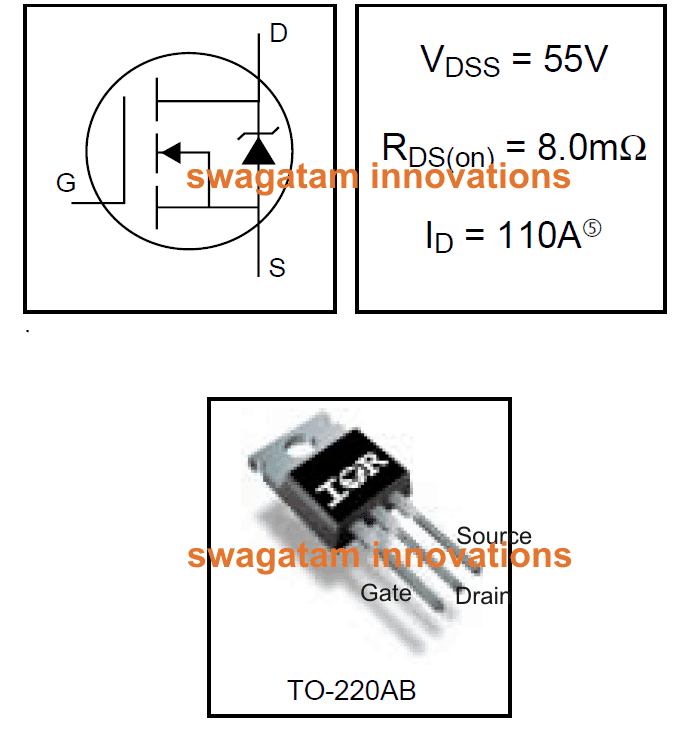
La següent imatge mostra el paquet del xip, que sembla un IC DIL de 10 pins, les diverses funcions de pinout del mateix es poden estudiar a partir de les dades que es proporcionen al diagrama:

Referint-se al diagrama del circuit del controlador BLDC sense sensor proposat tal com es presenta a l'article anterior i també a la imatge del xip superior, els detalls de pinouts es poden entendre de la següent manera:
Detalls del pinout IC
FG = És el pin indicador de velocitat del motor (sortida), que està equipat en un mode de col·lector obert amb un BJT intern.
El col·lector obert significa que la sortida d’aquest pinout produirà els PWM negatius a través d’enfonsaments lògics a través del col·lector obert i de terra, per tant, per obtenir una lectura vàlida, l’usuari haurà de connectar una resistència de tracció a través d’aquest col·lector obert i el subministrament positiu (5V ) per aconseguir la indicació de velocitat en aquest pinout.
FGS = És l'entrada del selector de l'indicador de velocitat, és a dir, aquí es pot introduir una lògica alta o baixa per activar / desactivar el pin indicador FG.
Vcc = El subministrament positiu a l’IC per permetre’l funcionar no ha de superar els 5V.
W, U i V són les sortides trifàsiques per al motor BLDC que se suposa que funciona mitjançant aquest CI. Això també actua com a entrades per detectar els impulsos EMF del motor per a la commutació sincronitzada necessària de les bobines del motor.
GND = Es refereix al pinout negatiu de subministrament del CI respecte al pin Vdd.
FR = Ajuda a seleccionar o comandar la direcció del motor i es pot canviar dinàmicament en qualsevol moment un cop el sistema s'encén, simplement introduint una lògica externa alta o lògica baixa.
PWM = Significa l'entrada de control PWM des d'un fitxer generador de formes d'ona PWM extern.
Aquesta entrada PWM pot ser variable per implementar el control de velocitat desitjat del motor BLDC connectat.
L’espai puntejat al centre del xip indica el coixinet tèrmic, que es pot fixar o prémer amb un dissipador de calor per enfonsar la possible generació de calor al xip mentre s’utilitza amb un motor BLDC carregat.
A la discussió anterior es detallen els detalls de connexió o de connexió del xip de controlador de motor BLDC sense sensor DRV10963, ara analitzem detalladament la configuració interna i el funcionament del xip amb l'ajut dels punts següents:
Descripció del dispositiu
El DRV10963 és un operador de motor elèctric sense sensor trifàsic amb MOSFET de potència incorporats (pont trifàsic en pont H). Està dissenyat per a una major productivitat, una reducció del soroll i un mínim de recompte de materials secundaris. L’exclusiu esquema de gestió sinusoidal de finestra sense sensor Iess de 180 ° proporciona una eficiència de desplaçament del motor sense soroll.
El DRV10963 format per una funcionalitat de detecció de bloqueig intel·ligent, unit a circuits de seguretat integrats addicionals per aconseguir un rendiment segur. El DRV10963 es pot trobar en un embalatge USON de 10 clavilles tèrmicament eficient amb una estora tèrmica descoberta.
Com funciona l'IC
El producte DRV10963 és un operador de motor sense sensor trifàsic amb MOSFET de potència infosa, ho és
creat específicament per a un rendiment superior, una ressonància reduïda i un mínim de funcions superficials del motor de recompte de peces superficials.
El pla principal de control sinusoidal de 180 ° sense finestra sense sensor presenta un funcionament del motor sense soroll mantenint una ondulació nominal del parell estimulada elèctricament. Després de la inicialització, el dispositiu DRV10963 girarà el motor en el recorregut especificat a través del pin d’entrada FR.
El xip DRV10963 funcionarà amb un motor BLDC trifàsic fent ús d’un pla de control sinusoïdal.
La importància de les tensions de fase sinusoïdal emprades depèn del cicle de treball del pin PWM. Mentre el motor es mou, l'IC DRV10963 proporciona les dades de velocitat al pin FG.
La unitat DRV10963 consisteix en una capacitat de detecció intel·ligent. En el cas que el motor es vegi atrofiat per una pressió externa, el programa identificarà el problema de bloqueig i prendrà mesures per salvaguardar-lo tot sol amb el motor.
El procediment particular del circuit de detecció de bloqueig es mostra detalladament a Detecció de bloqueig. El DRV10963 IC inclou, a més, diversos circuits de seguretat integrats, per exemple, protecció contra sobrecorrent, protecció contra sobretensió, sota protecció i contra temperatura.
Explicació característica
Entrada i control de velocitat
El DRV10963 presenta sortides PWM trifàsiques de 25-kl-lz que poden tenir un percentatge estàndard de formes d’ona sinusoïdals de fase en fase. En cas que es determini algun cicle pel que fa al terra, és probable que la forma d'ona detectada sigui un sinusoide protegit PWM combinat amb harmònics de tercer ordre, tal com es mostra a la figura 2.

Aquesta estratègia de codificació racionalitza les especificacions del controlador pel motiu que probablement hi haurà sovint una sortida de fase que podria ser igual a zero.
L’amplitud del resultat varia segons la tensió d’alimentació (VCC) i el cicle de treball obligatori PWM (PWM) tal com es defineix a l’equació 1 i es ressalta a la figura 3. L’amplitud òptima s’implementa un cop el cicle de treball PWM indicat és del 100 PERCENT.
Vphpk = PWMdc>

La velocitat del motor no es regula directament mitjançant l'ús de l'ordre PWM per regular l'amplitud de les tensions de fase que s'utilitzen per al motor.
El cicle de treball de l'entrada PWM es modifica en una quantitat digital de 9 bits (de 0 a 511).
La resolució de la regulació és 1/512 == 0,2%. L’analitzador del cicle de treball facilita una operació inicial d’intercanvi d’ordres entre el cicle de treball d’entrada i la figura digital de 9 bits.
Això es ressalta a la figura 4, en què r = 80 ms.

El rendiment d’intercanvi entre el cicle de treball ordenat PWM i l’amplitud màxima de sortida és variable al dispositiu DRV10963.
L'equació 1 discuteix l'amplitud màxima de resultat quan l'ordre PWM> cicle de treball mínim de funcionament. El cicle de treball de funcionament més baix sovint s'estableix fins a un 13%, un 10%, un 5% o cap restricció mitjançant la configuració OTP (MINOP_DC1: 0).
La taula 1 mostra les configuracions recomanades per al cicle de treball mínim d’operació.
Sempre que el cicle de treball indicat per PWM sigui inferior al cicle de treball en funcionament més baix i superior a l’1,5%, la sortida es regularà al cicle de treball mínim d’operació. Sempre que el cicle de treball d’entrada sigui inferior a l’1,5%, el dispositiu DRV10963 probablement no executarà la sortida i s’enviarà al mode d’espera.
Això es pot il·lustrar a la figura 6.

Configuracions rotatives
DRV10963 engegarà el motor mitjançant una tècnica detallada a la figura 7.

El gràfic d’inicialització del motor consisteix en alternatives configurables del dispositiu per al límit de canvi de bucle obert per tancar el bucle (HOW.), El temps d’alineació (TAHQH) i la velocitat d’acceleració (RACE).
Per alinear el rotor a la lògica de commutació, el DRV10963 executa un cicle de treball del x% a les fases V i W alhora que controla la fase U a GND.
Aquest escenari es manté durant segons TAIign. La significació del x% s’identifica per la tensió VCC (tal com es mostra a la taula 2) per mantenir un parell de rotació ampli sobre diverses tensions d’alimentació diferents.
A mesura que s’aconsegueix la seqüència d’alineació, el motor es veu obligat a accelerar posant tensions de fase sinusoïdal amb nivells de pic com es mostra a la taula 2 i augmentant mitjançant el rang de commutació a una velocitat d’expansió representada per RACE fins que el nivell de commutació creixi fins a Hom , Hz.
Tan bon punt s’arriba a aquest límit, el DRV‘l0963 es converteix en mode de bucle tancat, de manera que l’algorisme de control incorporat reconeix la progressió de la unitat de commutació mentre la tensió emprada s’identifica mitjançant l’entrada de cicle de treball obligatòria PWM.
El bucle obert per tancar el límit de canvi de bucle (Hom), el temps d’alineació (TAHQH) i la velocitat d’acceleració (RACE) es poden configurar mitjançant configuracions OTP.
La selecció del llindar de transferència (HOW,) solen aprovar-se mitjançant avaluació de proves i errors. L'objectiu seria preferir una tolerància de transferència que sigui tan mínima com sigui possible i que permeti al motor canviar sense esforç i fidelment entre l'acceleració de bucle obert i l'acceleració de bucle tancat.
Els motors de velocitat major (velocitat màxima) requereixen una tolerància de transmissió superior a causa del fet que els motors de velocitat elevada inclouen una disminució de Kt, per tant, un BEMF més assequible.
La taula 3 mostra les preferències configurables per a la tolerància de transferència. La velocitat més alta en Hz elèctrics es demostra com una referència per ajudar a triar la velocitat de transmissió desitjable per a un enviament específic.

L’elecció del temps d’alineació (TAHQH) i la velocitat d’acceleració (RACE) fins i tot pot dependre de l’examen de proves i errors.
Els motors amb major inèrcia solen exigir un temps d’alineació ampliat i una velocitat d’acceleració més lenta en contrast amb els motors amb inèrcia baixa que solen exigir un temps d’alineació més breu juntament amb un percentatge d’acceleració més ràpid. S’han d’implementar les compensacions del programa per aprofitar l’estabilitat del llançament i no pas per un període de rotació.
TI accepta començar per decidir les configuracions menys intenses (RACE més lent i Tmign significatiu) per comprometre el temps de parell en suport del màxim índex de compliment.
Tan bon punt es confirma que l'equip funciona a consciència, es poden utilitzar les configuracions més contundents (RACC més gran i TAHQH menor) per disminuir el moment de pujada i, al mateix temps, fer un seguiment amb precaució de la taxa de compliment.
La taula 4 mostra els paràmetres configurables per a TA'g ,, i RACE.

Es proporciona la part restant de l’explicació d’aquest IC BLDC sense sensor en aquest full de dades original
Si us plau, no dubteu a comentar per obtenir més informació sobre els detalls anteriors del circuit del controlador de motor BLDC sense sensor
Anterior: Circuit d'alimentació de la motxilla LED de 12V Següent: Circuit de control remot de quadcòpters sense MCU