L’article explica un circuit senzill de vehicle de seguiment de línia, també conegut com a vehicle de seguiment de línia, que utilitza només un parell d’amplificadors operatius i alguns components més, sense utilitzar Arduino ni microcontroladors complexos.
Què és un vehicle de seguiment de línia
Un vehicle seguidor de línia és una forma de vehicle guiat automàtic (AGV) que funciona detectant una línia blanca dibuixada o incrustada a terra. El senyal dels detectors fa que les rodes motoritzades girin i s’ajusten automàticament d’acord amb la línia, donant la impressió que el vehicle segueix la línia. D’aquí el seguidor de la línia del nom.
Bàsicament, els detectors tenen la forma de resistències fotogràfiques com LDR o detectors de llum semiconductors com foto díodes o transistors fotogràfics .
Un parell d’aquestes detectors de llum s’utilitzen per detectar la llum reflectida de la línia blanca i canviar un circuit transistoritzat o comparadors basats en amplificadors operatius, que al seu torn controlen els motors de les rodes del vehicle per maniobrar d’acord amb els girs i les corbes de la línia blanca a terra.
Ús de comparadors de finestres
Al circuit de vehicles seguidors de línia proposat, n’hem utilitzat un parell comparadors d'amplificadors operatius estava involucrant els motors en l’acte d’equilibri.
Els amplificadors operatius apareixen com a finestra compartaors . Com el seu nom indica, un comparador de finestres compara el senyal d'entrada dels detectors amb dues referències de tensió extrema que constitueixen els llindars de 'finestra'. Mentre el nivell del senyal d'entrada estigui dins dels llindars de referència d'aquesta 'finestra', la sortida d'ambdós amplificadors operatius manté una lògica elevada a les seves sortides.
No obstant això, en un cas el senyal d’entrada tendeix a creuar els llindars de referència, la sortida d’ampli d’operació rellevant es redueix, cosa que resulta en sortides oposades dels amplificadors d’op. Aquest desequilibri demana als dispositius de sortida que corregeixin la situació canviant adequadament les càrregues.
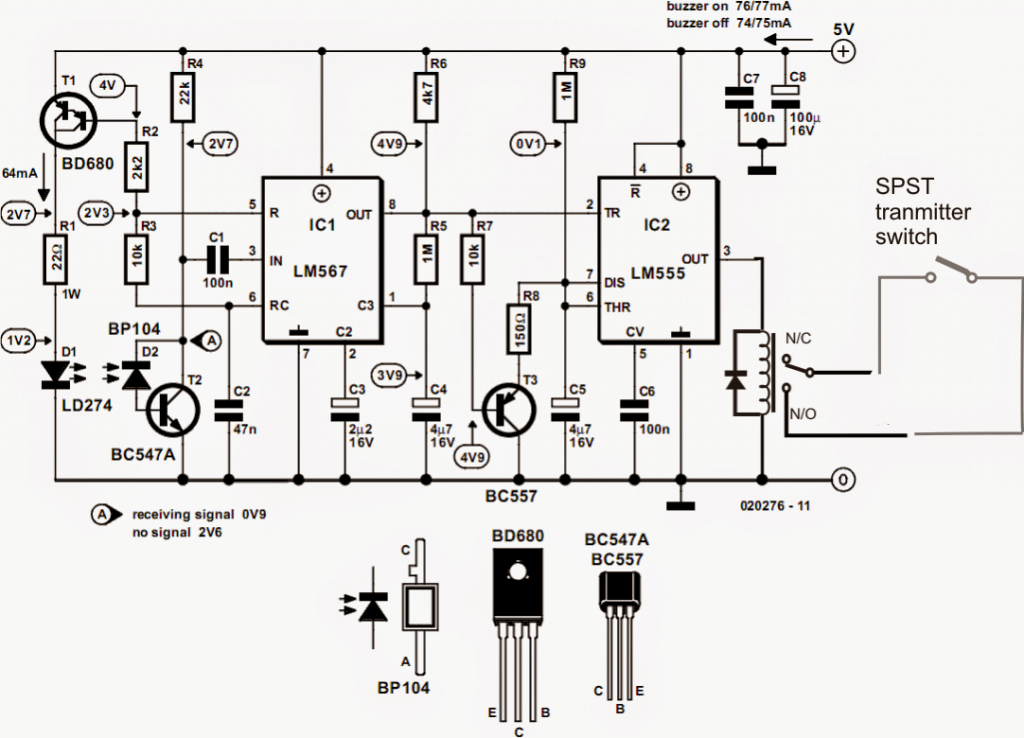
Com funciona el circuit
Referint-nos al diagrama de circuits del vehicle seguidor de línia a continuació, podem veure dos amplificadors operatius configurats com a compartidors de finestres.

Els amplificadors operatius poden ser de l’IC LM358 o LM324
L'amplificador operatiu superior està connectat per controlar el límit superior del llindar, mentre que l'amplificador operatiu inferior està connectat per controlar el límit límit inferior.
L’entrada inversora de l’amplificador op A1 i l’entrada no inversora de l’ampli op op A2 es fixen amb una tensió de referència fixa
L’entrada no inversora de l’amplificador op op A1 i l’entrada inversora de l’amplificador op op A2 s’uneixen i s’utilitzen per detectar les variacions del senyal d’entrada dels detectors de llum.
Els dos resistors dependents de la llum, LDR1 i LDR2, que actuen com a dispositius sensibles a la llum, es posicionen com a detectors de llum, de manera que reben la llum reflectida de la línia blanca de manera uniforme.
Mentre la llum dels LDR sigui suficientment alta i uniforme, el pin3 d’A1 es manté més alt que el pin2, ja que LDR1 està connectat amb la línia positiva. Això fa que la seva producció augmenti.
De la mateixa manera, el pin6 d'A2 es manté més baix que el pin5 a causa de la connexió LDR2 amb la línia de terra, i això permet que la sortida d'A2 es mantingui alta.
En altres paraules, quan els LDR estan il·luminats uniformement, les entrades no inversores (+) dels dos amplificadors operatius es mantenen més altes que les seves entrades inversores (-), cosa que fa que les seves sortides augmentin.
Amb les dues sortides altes, els controladors de transistors mantenen els motors respectius funcionant uniformement, cosa que permet que el vehicle circuli sense problemes sobre una línia recta.
Com el vehicle segueix la línia
Quan es troba una línia blanca corba, un dels LDR es desvia de la línia provocant una diferència de llum al punt A del circuit. Posteriorment, això fa que la sortida d’ampli d’operació rellevant baixi i una aturada momentània del motor corresponent.
En aquesta situació, l’altre motor lateral que encara està en funcionament obliga el vehicle a girar cap a l’angle de flexió de la línia, cosa que fa que el LDR ombrejat torni a la regió il·luminada de la línia blanca. Quan això passa, els dos motors tornen a funcionar i permeten que el vehicle funcioni amb normalitat.
La commutació automàtica ON / OFF anterior dels motors esquerre / dret en resposta a les variacions de llum de les línies blanques de flexió obliga el vehicle a seguir ajustant-se i maniobrant d’acord amb la línia blanca.
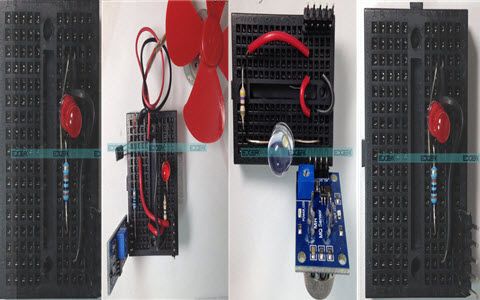
Com construir el vehicle
En una de les meves publicacions anteriors vam aprendre com vehicle senzill controlat a distància es podria construir utilitzant només un parell de motors connectats a la vora posterior d'un tauler rectangular i un parell de rodes fictícies a la vora frontal del tauler.

Per al circuit de vehicles seguidors de línia proposat també, fem servir una construcció similar per al vehicle, tal com es mostra a la figura anterior.
La disposició sembla força senzilla, les rodes posteriors s’uneixen amb motors controlats pels controladors de transistors a través de les sortides d’amplificador operatiu.
Quan el vehicle es desvia de la línia, la diferència del nivell de llum dels LDR apaga un dels amplificadors operatius, aturant el motor corresponent.
Això obliga al motor lateral oposat que està en funcionament, a girar cap al costat del motor aturat, és a dir, si es frena el motor de l’esquerra, el vehicle es veurà obligat a girar cap a l’esquerra, ajustant-se a la línia de plegat, en la mateixa direcció.
Això també suggereix que la integració del motor esquerre / dret amb les sortides d'amplificador operatiu s'hauria de fer adequadament de manera que la direcció de flexió de la línia i el motor que s'està parant estiguin al mateix costat del vehicle.
Com es posicionen els LDR
Atès que se suposa que els dos LDR (LDR1 i LDR2) detecten uniformement la llum reflectida de la línia blanca, la seva orientació hauria de ser perpendicular a la longitud de la línia, com es mostra a continuació.

Aquí, hem assumit que el vehicle circula de dreta a esquerra, seguint una línia establerta pel mateix camí.
L'amplada total dels LDR hauria de situar-se dins l'amplada de la línia.
Els LDR i el LED s’han d’instal·lar a la superfície inferior del vehicle i, preferiblement, a la part posterior, just a sota del joc de rodes posteriors.
El LED indicat és un LED blanc amb una resistència de la sèrie 1K. S'ha de situar a prop dels LDR i al centre, garantint que la llum del LDR no arribi directament als LDR, en canvi, la llum hauria d'arribar als LDR per reflexió des de la línia blanca que hi ha a sota.
Especificacions del motor
Els motors poden ser de qualsevol tipus amb imant permanent raspallat, però han d’estar equipats amb una caixa de canvis per assegurar que el moviment del vehicle sigui adequadament lent i constant.
La potència nominal del motor ha de ser segons la càrrega que se suposa que transporta el vehicle. Això es pot provar mitjançant alguna experimentació pràctica.
Com configurar-lo
Per configurar aquest circuit de seguidors de línia, haureu d’organitzar una petita tira de línia blanca pintada sobre una superfície plana o una cinta blanca enganxada a la superfície plana.
Col·loqueu el sistema (sense rodes) sobre la línia, tal com s'indica a l'esquema anterior, de manera que el LDR i el LED s’ajusten correctament a l’amplada de la línia.
Enceneu l’alimentació, el LED blanc hauria d’il·luminar la zona que hi ha sota. Ajusteu els dos valors predeterminats fins que els dos motors s’encenguin simultàniament.
Ara moveu la unitat lleugerament cap a la dreta de manera que el LDR1 surt de la línia blanca.
El motor esquerre s’ha d’aturar. Si no ho fa, ajusteu el P1 fins que el motor esquerre només s'aturi.
A continuació, moveu la unitat lleugerament cap a l'esquerra de manera que el LDR2 surt de la línia blanca. Això hauria d’aturar el motor del costat dret. Si no ho fa, ajusteu el valor predefinit de 10 k fins que el motor del costat dret només s'aturi.
Això completarà els procediments de configuració i ara podeu instal·lar les rodes als motors i utilitzar aquest vehicle guiat per seguir automàticament una pista establerta a terra.
Línia Blanca vs Línia Negra
El sistema de vehicles de seguidors de línia proposat es basa en una línia blanca incrustada a terra, en lloc d’una línia negra. L’avantatge d’utilitzar una línia blanca en lloc d’una línia negra és el següent:
La línia blanca té un aspecte més elegant i decent en comparació amb la línia negra.
El seguidor de línia basat en la línia blanca pot funcionar fins i tot en la foscor total o amb llums ambient fosques. Els dissenys basats en la llum negra normalment requereixen una il·luminació externa per mantenir el vehicle operatiu.
Una AGV basada en la línia blanca funciona amb més precisió independentment del color de les rajoles, excepte per a les rajoles extremadament blanques o equivalents al color de la línia blanca.
Conversió del vehicle en un seguidor de línia negra
Malgrat els avantatges anteriors, si l'usuari prefereix que el vehicle segueixi una línia negra, el sistema es podria transformar fàcilment per fer-ho mitjançant algunes modificacions ràpides al disseny proposat.
L'usuari només ha d'intercanviar o canviar les connexions del pin d'entrada dels amplificadors operatius amb els preajustats i eliminar el LED associat amb els LDR.
Anterior: Circuit de SAI d'ona sinusoïdal de 50 watts Següent: Circuits electrònics bàsics explicats: Guia per a principiants sobre electrònica
![Circuit convertidor de 24 V a 12 V CC [utilitzant un regulador de commutació]](https://electronics.jf-parede.pt/img/3-phase-power/F1/24-v-to-12-v-dc-converter-circuit-using-switching-regulator-1.jpg)