El post explica un circuit automàtic d’arrencada i aturada de la bomba submergible amb protecció contra funcionament en sec per tal d’implementar una commutació ON / OFF automàtica del motor en resposta als nivells d’aigua alta / baixa del tanc aeri.
Concepte de circuit
En una de les entrades anteriors vam aprendre un concepte similar que també tractava un funció d’arrencada / parada automàtica del botó de contacte de la bomba submergible , però, des d'aquí els sensors implicats interruptors flotants , el disseny semblava una mica complex i no era adequat per a tothom.
A més, la protecció contra funcionament en sec inclosa en el disseny es basava en el canvi de temperatura del motor per executar la protecció necessària del motor. Aquesta característica tampoc no era massa desitjable per a un profà, ja que no era fàcil instal·lar el sensor de calor sobre el motor subterrani.
En aquest post he intentat eliminar totes aquestes molèsties i he dissenyat un circuit que es presenta per detectar la presència d’aigua únicament a través de sensors metàl·lics immersos a les fonts d’aigua corresponents.
Funcionament del circuit
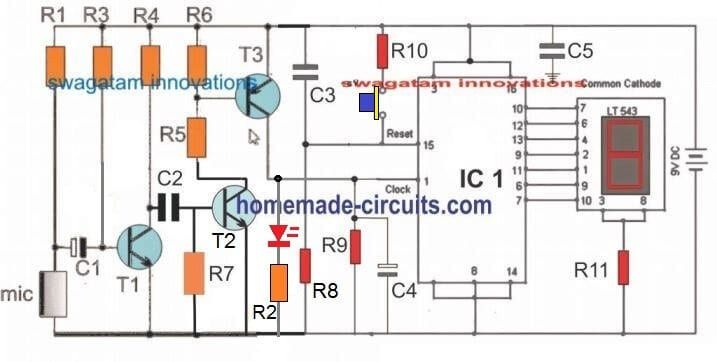
Comprenguem el circuit d’arrencada automàtica submergible proposat, circuit d’aturada amb protecció contra funcionament en sec.

Es pot veure un únic IC 4049 activat per a tota la detecció, iniciar accions de parada i l'execució de la protecció contra funcionament en sec.
Les portes implicades aquí són 6 NO portes de l'IC 4049 que bàsicament estan equipades com a inversors (per invertir la polaritat de la tensió alimentada a la seva entrada).
Suposem que l’aigua a l’interior del tanc superior està per sota del llindar inferior desitjat, tal com s’indica al diagrama anterior.
La situació elimina el potencial positiu que es subministra a través de l'aigua a l'entrada de N1. N1 respon a això fent que aparegui un positiu al pin de sortida, cosa que provoca que C1 comenci a carregar-se instantàniament mitjançant R2.
La condició anterior també permet que el positiu de la sortida de N1 arribi a l'entrada de N2, que al seu torn produeix un mínim o un negatiu a la base de T1 a través de R3 ... el relé associat ara activa i activa el botó 'START' 'botó del contactor .... tanmateix, l'activació del relé només es manté durant un segon aproximadament fins que C1 estigui completament carregat, es pot establir aquesta longitud ajustant adequadament els valors de C1 / R2.
De moment, oblidem-nos de l’etapa N5 / N6, que es posiciona per a la implementació de la protecció contra funcionament en sec.
Suposem que la bomba funciona i aboca aigua al tanc OH mostrat.
Ara l'aigua comença a omplir-se dins del dipòsit, fins que el nivell arriba a la vora del dipòsit 'besant' el sensor corresponent a l'entrada N3.
Això permet que un positiu a través de l’aigua alimenti l’entrada de N3, permetent que la seva sortida baixi (negativa), cosa que provoca que C2 comenci a carregar-se instantàniament mitjançant R5, però en aquest procés l’entrada de N4 també es redueix i la seva sortida s’inverteix un alt que demana al controlador del relé que l'activi.
El relé superior s'activa instantàniament, però només durant un segon, commutant el botó 'STOP' del contactor i aturant el motor de la bomba. El temps de relé es pot establir ajustant adequadament els valors de C2 / R5.
L'explicació anterior s'encarrega del control automàtic del nivell de l'aigua alternant el botó submergible d'inici / aturada pels relés del circuit. Ara pot ser interessant aprendre com la protecció contra funcionament en sec està dissenyada per prevenir un risc en funcionament en sec si no hi ha aigua a l'interior del forat o d'un tanc subterrani.
Tornem a la situació inicial quan l’aigua de l’OHT ha caigut per sota del llindar inferior i ha reduït el mínim a l’entrada de N1 ... que també fa que l’entrada N5 sigui mínima.
La sortida N5 augmenta a causa d'això i proporciona un subministrament positiu per a C3 perquè pugui començar a carregar-se.
Tanmateix, ja que se suposa que el procés també arrenca el motor, si hi ha aigua, la bomba pot començar a abocar aigua a l’OHT, que suposadament es detecta mitjançant l’entrada de N6, fent que la seva sortida baixi.
Amb la sortida de N6 a baixa, C3 s’inhibeix de carregar-se i la situació es manté impassible ... i el motor continua bombejant aigua sense canvis en els procediments explicats anteriorment.
Però, suposem que el motor experimenta un funcionament sec a causa de l’absència d’aigua al pou .... com s’ha indicat anteriorment, C3 comença a carregar-se i la sortida de N6 mai es torna negativa per evitar que C3 es carregui completament ... per tant, C3 és capaç per completar la seva càrrega en un període de temps predeterminat (decidit per C3 / R8) i finalment produir un alt (positiu) a l'entrada N3.
N3 respon a això de la mateixa manera que ho faria quan l'aigua del dipòsit es detecta al llindar superior ... provocant el canvi del relé superior i impedint que el motor funcioni més.
Així, s’executa la protecció contra funcionament en sec per al circuit d’arrencada i parada de la bomba submergible discutida.
Llista de peces
- R1, R4, R9 = 6M8
- R3, R7, R6 = 10K
- R8 = 100.000
- R2, R5, C1, C2, C3 = a determinar amb l'experimentació
- N1 ------ N6 = IC 4049
- TOTS ELS DIODES = 1N4007
- RELLEUS = 12V, 10AMP
- T1 = BC557
- T2 = BC547
Anterior: Regulador de motocicletes, circuit de verificador de rectificadors Següent: Circuit de simulador rotatiu de balisa LED