
Com el seu nom indica, aquest article donarà una idea precisa sobre l’estructura i el funcionament del controlador PID. Tot i que anem a detalls, fem una introducció sobre els controladors PID. Els controladors PID es troben en una àmplia gamma d’aplicacions per al control de processos industrials. Aproximadament el 95% de les operacions de bucle tancat del automatització industrial el sector utilitza controladors PID. PID significa Proporcional-Integral-Derivada. Aquests tres controladors es combinen de manera que produeix un senyal de control. Com a controlador de retroalimentació, proporciona la sortida de control als nivells desitjats. Abans d’inventar-se els microprocessadors, els components electrònics analògics implementaven el control PID. Però avui tots els controladors PID són processats pels microprocessadors. Controladors lògics programables també teniu les instruccions incorporades del controlador PID. A causa de la flexibilitat i fiabilitat dels controladors PID, aquests s’utilitzen tradicionalment en aplicacions de control de processos.
Què és un controlador PID?
El terme PID significa derivada integral proporcional i és un tipus de dispositiu que s’utilitza per controlar diferents variables de procés com la pressió, el cabal, la temperatura i la velocitat en aplicacions industrials. En aquest controlador, s’utilitza un dispositiu de retroalimentació del bucle de control per regular totes les variables del procés.
Aquest tipus de control s'utilitza per conduir un sistema en la direcció d'una ubicació objectiva d'un altre nivell. És gairebé a tot arreu per al control de temperatura i s'utilitza en processos científics, automatització i infinitat de productes químics. En aquest controlador, la retroalimentació en bucle tancat s'utilitza per mantenir la sortida real d'un mètode com ara prop de l'objectiu, en cas contrari la sortida al punt fixe si és possible. En aquest article, es discuteix el disseny del controlador PID amb els modes de control utilitzats com P, I & D.
Història
La història del controlador PID és que, l’any 1911, Elmer Sperry va desenvolupar el primer controlador PID. Després d'això, TIC (Taylor Instrumental Company) es va implementar un antic controlador pneumàtic completament sintonitzable l'any 1933. Al cap d’uns anys, els enginyers de control van eliminar l’error d’estat estacionari que es troba dins dels controladors proporcionals mitjançant la reajustació del final a algun valor fals fins que l’error no va ser zero.
Aquesta reajustament va incloure l'error que es coneix com a controlador proporcional-integral. Després d'això, l'any 1940, es va desenvolupar el primer controlador pneumàtic PID mitjançant una acció derivada per reduir els problemes de sobredimensionament.
El 1942, Ziegler i Nichols han introduït regles d’ajust per descobrir i establir els paràmetres adequats dels controladors PID pels enginyers. Per fi, els controladors PID automàtics es van utilitzar àmpliament a les indústries a mitjan 1950.
Diagrama de blocs del controlador PID
Un sistema de llaç tancat com un controlador PID inclou un sistema de control de retroalimentació. Aquest sistema avalua la variable de retroalimentació mitjançant un punt fix per generar un senyal d'error. Basat en això, altera la sortida del sistema. Aquest procediment continuarà fins que l'error arribi a zero, en cas contrari, el valor de la variable de retroalimentació esdevindrà equivalent a un punt fix.
Aquest controlador proporciona bons resultats en comparació amb el controlador tipus ON / OFF. Al controlador de tipus ON / OFF, només es poden obtenir dues condicions per gestionar el sistema. Un cop el valor del procés sigui inferior al punt fix, s’encendrà. De la mateixa manera, s'apagarà quan el valor sigui superior al valor fix. La sortida no és estable en aquest tipus de controladors i oscil·larà freqüentment a la regió del punt fix. Tot i això, aquest controlador és més estable i precís en comparació amb el controlador tipus ON / OFF.

Funcionament del controlador PID
Funcionament del controlador PID
Amb l’ús d’un controlador ON-OFF simple de baix cost, només són possibles dos estats de control, com ara totalment ON o OFF completament. S'utilitza per a una aplicació de control limitada on aquests dos estats de control són suficients per a l'objectiu de control. Tot i que la naturalesa oscil·lant d'aquest control limita el seu ús i, per tant, està sent substituït per controladors PID.
El controlador PID manté la sortida de manera que no hi hagi error zero entre la variable de procés i el valor de consigna / sortida desitjada per operacions de bucle tancat. El PID utilitza tres comportaments bàsics de control que s’expliquen a continuació.
P- Controlador
El controlador proporcional o P- proporciona una sortida proporcional a l'error actual e (t). Compara el punt desitjat o fixat amb el valor real o el valor del procés de retroalimentació. L'error resultant es multiplica amb una constant proporcional per obtenir la sortida. Si el valor d'error és zero, la sortida del controlador és zero.

Controlador P.
Aquest controlador requereix biaix o restabliment manual quan s’utilitza sol. Això es deu al fet que mai no arriba a la condició d’equilibri. Proporciona un funcionament estable, però sempre manté l'error d'estat estacionari. La velocitat de la resposta augmenta quan augmenta la constant proporcional Kc.

Resposta del controlador P
I-Controller
A causa de la limitació del controlador p on sempre hi ha un desplaçament entre la variable de procés i el punt de consigna, es necessita el controlador I, que proporciona l'acció necessària per eliminar l'error d'estat estacionari. Integra l’error durant un període de temps fins que el valor de l’error arriba a zero. Manté el valor del dispositiu de control final en què l'error esdevé zero.

Controlador PI
El control integral disminueix la seva producció quan es produeix un error negatiu. Limita la velocitat de resposta i afecta l'estabilitat del sistema. La velocitat de la resposta augmenta disminuint el guany integral, Ki.

Resposta del controlador PI
A la figura anterior, a mesura que disminueix el guany del controlador I, l'error d'estat estacionari també continua disminuint. En la majoria dels casos, el controlador PI s'utilitza especialment quan no és necessària la resposta d'alta velocitat.
Mentre s'utilitza el controlador PI, la sortida del controlador I es limita a un cert rang per superar el liquidació integral condicions en què la producció integral augmenta fins i tot en estat d'error zero, a causa de les no linealitats a la planta.
Controlador D
I-controller no té la capacitat de predir el comportament futur de l’error. De manera que reacciona amb normalitat un cop canviat el valor de consigna. El controlador D supera aquest problema anticipant el comportament futur de l'error. La seva producció depèn de la velocitat de canvi d'error respecte al temps, multiplicada per la constant derivada. Dóna la sortida inicial a la sortida augmentant així la resposta del sistema.

Controlador PID
A la resposta de la figura anterior de D, el controlador és més, en comparació amb el controlador PI, i també es redueix el temps de resolució de la sortida. Millora l'estabilitat del sistema compensant el desfasament de fase causat per l'I-controller. L’augment del guany derivat augmenta la velocitat de resposta.

Resposta del controlador PID
Finalment, hem observat que, combinant aquests tres controladors, podem obtenir la resposta desitjada per al sistema. Diferents fabricants dissenyen diferents algoritmes PID.
Tipus de controlador PID
Els controladors PID es classifiquen en tres tipus, com ara els controladors ON / OFF, proporcionals i estàndard. Aquests controladors s'utilitzen basats en el sistema de control, l'usuari pot utilitzar el controlador per regular el mètode.
Control ON / OFF
Un mètode de control on-off és el tipus de dispositiu més senzill que s’utilitza per al control de temperatura. La sortida del dispositiu pot estar ON / OFF sense cap estat central. Aquest controlador activarà la sortida simplement un cop la temperatura creui el punt fix. Un controlador de límit és un tipus particular de controlador ON / OFF que utilitza un relé de bloqueig. Aquest relé es restableix manualment i s’utilitza per apagar un mètode un cop s’assoleix una temperatura determinada.
Control proporcional
Aquest tipus de controlador està dissenyat per eliminar el ciclisme que es connecta mitjançant el control ON / OFF. Aquest controlador PID reduirà la potència normal subministrada cap a l’escalfador un cop la temperatura arribi al punt fix.
Aquest controlador té una característica per controlar l'escalfador de manera que no superi el punt fix, però arribarà al punt fix per mantenir una temperatura constant.
Aquest acte de proporció es pot aconseguir activant i desactivant la sortida durant períodes de temps reduïts. Aquesta proporció de temps canviarà la proporció del temps d’ACTIVACIÓ al temps d’APAGAT per controlar la temperatura.
Controlador PID de tipus estàndard
Aquest tipus de controlador PID combinarà el control proporcional mitjançant un control integral i derivat per ajudar automàticament la unitat a compensar les modificacions del sistema. Aquestes modificacions, integrals i derivades, s’expressen en unitats basades en el temps.
Aquests controladors també es remeten a través dels seus recíprocs, RATE & RESET corresponentment. Els termes de PID s'han d'ajustar per separat, en cas contrari, s'han d'ajustar a un sistema específic amb la prova, així com amb l'error. Aquests controladors oferiran el control més precís i constant dels 3 tipus de controladors.
Controladors PID en temps real
Actualment, hi ha diversos tipus de controladors PID disponibles al mercat. Aquests controladors s’utilitzen per a requisits de control industrial com la pressió, la temperatura, el nivell i el cabal. Una vegada que aquests paràmetres es controlen mitjançant PID, les opcions consisteixen a utilitzar un controlador PID separat o un PLC.
Aquests controladors independents s’utilitzen allà on s’hagi de comprovar un altre bucle, així com controlar-los d’una altra manera, sempre que sigui complex a la dreta d’entrada a través de sistemes més grans.
Aquests dispositius de control ofereixen diferents opcions per al control de bucle solo i doble. Els controladors PID de tipus autònom proporcionen diverses configuracions de punt fix per produir diverses alarmes autònomes.
Aquests controladors independents inclouen principalment controladors PID de Honeywell, controladors de temperatura de Yokogawa, controladors de sintonització automàtica de controladors OMEGA, Siemens i ABB.
Els PLC s’utilitzen com a controladors PID en la majoria de les aplicacions de control industrial. La disposició dels blocs PID es pot fer dins de PAC o PLC per donar opcions superiors per a un control PLC exacte. Aquests controladors són més intel·ligents i potents en comparació amb controladors independents. Cada PLC inclou el bloc PID dins de la programació de programari.
Mètodes de sintonització
Abans que es produeixi el funcionament del controlador PID, cal ajustar-lo per adaptar-lo a la dinàmica del procés a controlar. Els dissenyadors proporcionen els valors predeterminats per als termes P, I i D, i aquests valors no podrien donar el rendiment desitjat i, de vegades, comporten inestabilitat i un rendiment lent de control. Es desenvolupen diferents tipus de mètodes d’ajust per sintonitzar els controladors PID i requereixen molta atenció de l’operador per seleccionar els millors valors de guanys proporcionals, integrals i derivats. Alguns d'aquests es donen a continuació.
Els controladors PID s’utilitzen en la majoria d’aplicacions industrials, però s’ha de conèixer la configuració d’aquest controlador per ajustar-lo correctament i generar la sortida preferida. Aquí, l’ajust no és res més que el procediment per rebre una resposta ideal del controlador mitjançant la configuració dels millors guanys proporcionals, factors integrals i derivats.
La sortida desitjada del controlador PID es pot obtenir ajustant el controlador. Hi ha diferents tècniques disponibles per obtenir la sortida necessària del controlador, com ara prova i error, Zeigler-Nichols i la corba de reacció del procés. Els mètodes més freqüentment utilitzats són la prova i error, Zeigler-Nichols, etc.
Mètode de prova i error: És un mètode senzill d’ajust del controlador PID. Mentre el sistema o el controlador funcionen, podem ajustar-lo. En aquest mètode, primer, hem d’establir els valors de Ki i Kd a zero i augmentar el terme proporcional (Kp) fins que el sistema tingui un comportament oscil·lant. Un cop sigui oscil·lant, ajusteu Ki (terme integral) perquè les oscil·lacions s'aturin i, finalment, ajusteu D per obtenir una resposta ràpida.
Tècnica de la corba de reacció del procés: És una tècnica d’afinació de bucle obert. Produeix una resposta quan s'aplica una entrada de pas al sistema. Inicialment, hem d'aplicar algunes sortides de control al sistema manualment i hem de registrar la corba de resposta.
Després d’això, hem de calcular el pendent, el temps mort, el temps de pujada de la corba i, finalment, substituir aquests valors en equacions de P, I i D per obtenir els valors de guany dels termes PID.

Corba de reacció del procés
Mètode Zeigler-Nichols: Zeigler-Nichols va proposar mètodes de bucle tancat per sintonitzar el controlador PID. Aquests són el mètode de ciclatge continu i el mètode d’oscil·lació amortida. Els procediments per als dos mètodes són els mateixos, però el comportament de l’oscil·lació és diferent. En això, primer, hem d’establir la constant del controlador p, Kp a un valor particular, mentre que els valors de Ki i Kd són nuls. El guany proporcional augmenta fins que el sistema oscil·la a una amplitud constant.
El guany en què el sistema produeix oscil·lacions constants s’anomena guany final (Ku) i el període d’oscil·lacions s’anomena període final (Pc). Un cop assolit, podem introduir els valors de P, I i D al controlador PID per la taula Zeigler-Nichols depèn del controlador utilitzat com P, PI o PID, com es mostra a continuació.

Taula Zeigler-Nichols
Estructura del controlador PID
El controlador PID consta de tres termes, és a dir, el control proporcional, integral i derivat. El funcionament combinat d’aquests tres controladors proporciona una estratègia de control per al control de processos. El controlador PID manipula les variables del procés com la pressió, la velocitat, la temperatura, el flux, etc. Algunes de les aplicacions utilitzen controladors PID en xarxes en cascada on s’utilitzen dos o més PID per aconseguir el control.

Estructura del controlador PID
La figura anterior mostra l'estructura del controlador PID. Consisteix en un bloc PID que dóna sortida al bloc de procés. El procés / planta consta de dispositius de control final com actuadors, vàlvules de control i altres dispositius de control per controlar diversos processos de la indústria / planta.
Es compara un senyal de retroalimentació de la planta de procés amb un punt de referència o un senyal de referència u (t) i el senyal d’error corresponent e (t) s’alimenta a l’algorisme PID. Segons els càlculs de control proporcional, integral i derivat de l'algorisme, el controlador produeix una resposta combinada o una sortida controlada que s'aplica als dispositius de control de la planta.
Totes les aplicacions de control no necessiten els tres elements de control. Combinacions com els controls PI i PD s’utilitzen molt sovint en aplicacions pràctiques.
Aplicacions
Les aplicacions del controlador PID inclouen el següent.
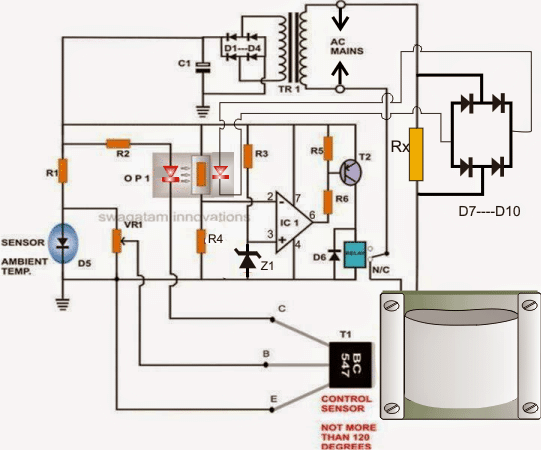
La millor aplicació del controlador PID és el control de temperatura, on el controlador utilitza una entrada d’un sensor de temperatura i la seva sortida es pot relacionar amb un element de control com un ventilador o un escalfador. En general, aquest controlador és simplement un element d’un sistema de control de temperatura. Cal examinar tot el sistema i tenir-lo en compte a l’hora de triar el controlador adequat.
Control de temperatura del forn
En general, els forns s’utilitzen per incloure calefacció i contenen una gran quantitat de matèria primera a temperatures enormes. És habitual que el material ocupat inclogui una massa enorme. En conseqüència, requereix una gran quantitat d’inèrcia i la temperatura del material no es modifica ràpidament fins i tot quan s’aplica una calor enorme. Aquesta característica dóna com a resultat un senyal fotovoltaic moderadament estable i permet que el període derivat es corregeixi eficientment de la fallada sense canvis extrems ni al FCE ni al CO.
Controlador de càrrega MPPT
La característica V-I d'una cèl·lula fotovoltaica depèn principalment de l'interval de temperatura i de la irradiació. En funció de les condicions meteorològiques, el corrent i el voltatge de funcionament canviaran constantment. Per tant, és extremadament significatiu fer el seguiment del PowerPoint més alt d’un sistema fotovoltaic eficient. El controlador PID s’utilitza per trobar MPPT donant punts de corrent i voltatge fixos al controlador PID. Un cop canviat el clima, el rastrejador manté el corrent i el voltatge estables.
El convertidor d’electrònica de potència
Sabem que el convertidor és una aplicació d’electrònica de potència, de manera que un controlador PID s’utilitza principalment en convertidors. Sempre que un convertidor s’associa a través d’un sistema basat en el canvi dins de la càrrega, es canviarà la sortida del convertidor. Per exemple, un inversor s’alia amb la càrrega, l’enorme corrent es subministra un cop s’incrementen les càrregues. Per tant, el paràmetre de tensió i el corrent no és estable, però s’alterarà en funció del requisit.
En aquest estat, aquest controlador generarà senyals PWM per activar els IGBT de l’inversor. En funció del canvi dins de la càrrega, el senyal de resposta es proporciona al controlador PID de manera que produeixi un error. Aquests senyals es generen a partir del senyal de fallada. En aquest estat, podem obtenir entrades i sortides canviables mitjançant un inversor similar.
Aplicació del controlador PID: Control de bucle tancat per a un motor de corrent continu sense escombretes
Interfície del controlador PID
El disseny i la interfície del controlador PID es pot fer mitjançant el microcontrolador Arduino. Al laboratori, el controlador PID basat en Arduino està dissenyat mitjançant la placa Arduino UNO, components electrònics, refrigerador termoelèctric, mentre que els llenguatges de programació de programari utilitzats en aquest sistema són C o C ++. Aquest sistema s’utilitza per controlar la temperatura al laboratori.
Els paràmetres de PID per a un controlador específic es troben físicament. La funció de diversos paràmetres PID es pot implementar mitjançant el contrast posterior entre diferents formes de controladors.
Aquest sistema d'interfície pot calcular eficientment la temperatura mitjançant un error de ± 0,6 ℃, mentre que es regula una temperatura constant mitjançant una petita diferència respecte al valor preferit. Els conceptes utilitzats en aquest sistema proporcionaran tècniques econòmiques i exactes per gestionar paràmetres físics en un rang preferit dins del laboratori.
Per tant, aquest article analitza una visió general del controlador PID que inclou historial, diagrama de blocs, estructura, tipus, treball, mètodes d’ajust, interfície, avantatges i aplicacions. Esperem haver estat capaços de proporcionar coneixements bàsics però precisos sobre els controladors PID. Aquí teniu una pregunta senzilla per a tots vosaltres. Entre els diferents mètodes de sintonització, quin mètode s’utilitza preferentment per aconseguir un funcionament òptim del controlador PID i per què?
Se us demana que doni les vostres respostes amablement a la secció de comentaris de sota.
Crèdits fotogràfics
Diagrama de blocs del controlador PID per wikimedia
Estructura del controlador PID, controlador P, P - resposta del controlador i controlador PID per blog.opticontrols
P - resposta del controlador per controls.engin.umich
PI- resposta del controlador per menjar
Resposta del controlador PID per wikimedia
Taula Zeigler-Nichols de controls.engin






{kind=link}
{kind=link}
{kind=link}
{kind=link}