
Quan escoltem la paraula sistema operatiu, en primer lloc tenim en compte que el sistema operatiu utilitzat en ordinadors portàtils i ordinadors. En general, fem servir diferents tipus de sistemes operatius com Windows XP, Linux, Ubuntu, Windows 7,8.8.1 i 10. Als telèfons intel·ligents, els sistemes operatius són com KitKat, Jellybean, marshmallow i Nougat. En un dispositiu electrònic digital, hi ha algun tipus de sistema operatiu desenvolupat per el programa de microcontroladors . N’hi ha diferents tipus de sistemes operatius a desenvolupar per al microcontrolador, però aquí hem parlat del sistema operatiu en temps real.
Què és un sistema operatiu en temps real?
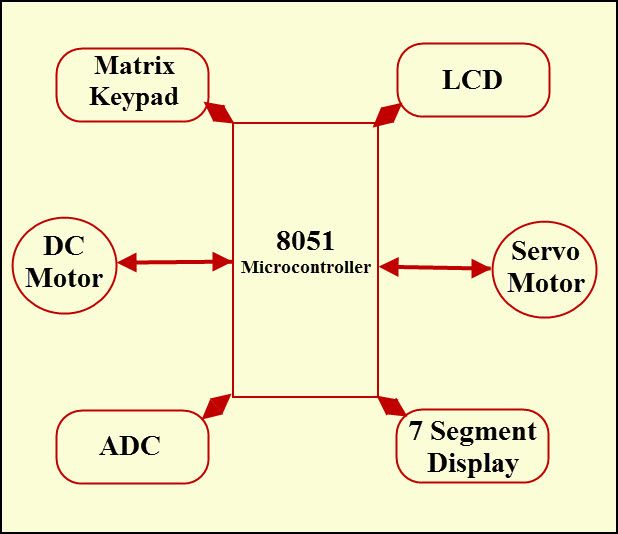
El RTOS és un sistema operatiu, és un cervell del sistema en temps real i la seva resposta a les entrades immediatament. A RTOS, la tasca es completarà al temps especificat i les seves respostes de manera previsible a esdeveniments imprevisibles. A continuació es mostra l’estructura del RTOS.

Estructura de RTOS
Tipus de RTOS
Hi ha tres tipus diferents de RTOS que segueixen
- Sistema operatiu suau en temps real
- Sistema operatiu dur en temps real
- Sistema operatiu ferm en temps real

Tipus de RTOS
Sistema operatiu suau en temps real
El sistema operatiu en temps real suau té determinats terminis, es poden perdre i duran a terme l'acció en un moment t = 0 +. El sistema operatiu en temps real suau és un tipus de sistema operatiu i no conté regles limitades a extremes. El temps crític d’aquest sistema operatiu es retarda fins a cert punt. Els exemples d’aquest sistema operatiu són la càmera digital, els telèfons mòbils i les dades en línia, etc.

Sistema operatiu suau en temps real
Sistema operatiu dur en temps real
Aquest també és un tipus de sistema operatiu i es preveu per un termini. Els terminis previstos reaccionaran en un moment t = 0. Alguns exemples d’aquest sistema operatiu són el control de coixins d’aire als cotxes, el fre antiblocatge i el sistema de control del motor, etc.
Sistema operatiu ferm en temps real
A la empresa en temps real, un sistema operatiu té determinades limitacions de temps, no són estrictes i poden provocar efectes no desitjats. Els exemples d’aquest sistema operatiu són una inspecció visual en automatització industrial.
Treballar amb el sistema operatiu en temps real
Hi ha diferents tipus de funcionalitats bàsiques que segueixen un RTOS
- Planificador basat en prioritats
- Rutina d’interrupció del rellotge del sistema
- Comportament determinista
- Sincronització i missatgeria
- Servei RTOS
Planificador basat en prioritats
Al planificador basat en prioritats, la major part del RTOS té entre 32 i 256 possibles prioritats per a les tasques o processos individuals. Aquest planificador executarà el procés amb la màxima prioritat. Si la tasca s’executa a la CPU, s’executa la següent tasca de màxima prioritat i continua els processos.
Al sistema, el procés de màxima prioritat tindrà la CPU
- Corre per tancar
- Si el nou preveu la tasca original, es prepara un procés d'alta prioritat.
Hi ha tres estats de les tasques o processos que estan a punt per executar-se i l’altre està bloquejat i a continuació es proporciona la descripció de cada estat.
A punt per córrer
Es diu que està a punt per executar-se quan el procés té tots els recursos per executar, però no hauria d’estar en estat d’execució. Després es diu com a llest per córrer.
Córrer
Si la tasca s'està executant, es diu que té un estat en execució.
Bloquejat
En aquest estat, si no disposa dels recursos suficients per executar-se, s’envia a l’estat bloquejat.
Es modifiquen tres tècniques per programar la tasca, a continuació es descriuen.
Programació cooperativa
En aquest tipus de planificació, la tasca s'executarà fins que finalitzi l'execució
Programació de la ronda Robin
En aquesta planificació, a cada procés se li assigna una franja horària fixa i el procés ha de completar la seva execució o bé la tasca perd el flux i la generació de dades.
Programació preventiva
La planificació preventiva implica l'assignació de temps dependent del temps prioritària. En general, s’utilitzen 256 nivells de prioritat i cada tasca té un nivell de prioritat únic. Hi ha alguns sistemes que admeten un nivell més prioritari i diverses tasques tenen algunes prioritats.
Rutina d’interrupció del rellotge del sistema
Per realitzar l'operació sensible al temps, el RTOS proporcionarà algun tipus de rellotge del sistema. Si hi ha un rellotge del sistema d'1 ms, haureu de completar la tasca en 50 ms. Normalment, hi ha una API que us segueix per dir 'Desperta'm en 50 ms'. Per tant, la tasca estaria en posició de dormir fins que el RTOS es despertés. Tenim dos avisos que el despertar no garantirà que s'executi exactament en aquest moment, depèn de la prioritat i si la prioritat més alta s'està executant actualment es retardaria.
Comportament determinista
El RTOS es mou molt per protegir que, ja sigui que hàgiu realitzat 100 tasques o 10 tasques, no fa cap diferència en la distància per canviar de context i determina la següent tasca de màxima prioritat. A la zona principal determinista, el RTOS és el maneig de les interrupcions, quan se'ls assenyala la línia d'interrupció, el RTOS pren immediatament l'acció de la rutina de servei d'interrupció correcta i la interrupció es gestiona sense demora.
Hem de sorprendre que els desenvolupadors del projecte escriuran els ISR específics del maquinari. Abans, RTOS oferia els ISR per als ports sèrie, els rellotges del sistema i pot ser un maquinari de xarxa, però si hi ha alguna cosa especialitzada, com ara senyals de marcapassos, actuadors, etc., no formen part del RTOS.
Això es tracta de generalitzacions brutes i hi ha una implementació de gran varietat a RTOS. Alguns dels RTOS funcionen de manera diferent i la descripció anterior és compatible amb la gran part del RTOS existent.
Sincronització i missatgeria
La sincronització i la missatgeria proporcionen la comunicació entre la tasca d’un sistema a un altre sistema i els serveis de missatgeria que segueixen. Per sincronitzar les activitats internes s’utilitza el senyalador d’esdeveniments i enviar els missatges de text que podem utilitzar a la bústia de correu, a les canonades i a les cues de missatges. A les àrees de dades habituals, s’utilitzen els semàfors.
- Semàfors
- Banderes d'esdeveniments
- Bústies de correu
- Tubs
- Cues de missatges
Servei RTOS
La part més important del sistema operatiu és el nucli. Per supervisar el maquinari s’hauria d’alleugerir la tasca i les responsabilitats del nucli gestionen i assignen els recursos. Si la tasca no pot obtenir l'atenció de la CPU cada vegada, hi ha alguns altres serveis que proporciona el nucli. Els següents són
- Serveis horaris
- Serveis de manipulació d’interrupcions
- Serveis de gestió de dispositius
- Serveis de gestió de memòria
- Serveis d’entrada-sortida
Avantatges de RTOS
- Quan tots els recursos i dispositius estan inactius, el RTOS proporciona el màxim consum del sistema i més sortida.
- Quan es realitza una tasca, no hi ha cap possibilitat d’obtenir l’error perquè el RTOS no té errors.
- L’assignació de memòria és el millor tipus per gestionar en aquest tipus de sistemes.
- En aquest tipus de sistemes, el temps de canvi és molt inferior.
- A causa de la petita mida del programa, el RTOS s'utilitza al fitxer sistema incrustat com el transport i altres.
En aquest article, hem parlat de com funcionarà el sistema operatiu en temps real. Espero que llegint això hagi obtingut informació bàsica. Si teniu cap pregunta sobre aquest article o per implementar projectes elèctrics Si us plau, no dubteu a comentar a la secció següent. Aquesta és la vostra pregunta, quines són les funcions de RTOS?







![4 circuits simples de commutació de palmes [Provat]](https://electronics.jf-parede.pt/img/4017-ic-circuits/21/4-simple-clap-switch-circuits.png)