
Un motor pas a pas és un dispositiu electromecànic que converteix l'energia elèctrica en potència mecànica. A més, és un motor elèctric síncron i sense escombretes que pot dividir una rotació completa en un gran nombre de passos. La posició del motor es pot controlar amb precisió sense cap mecanisme de retroalimentació, sempre que el motor tingui una mida acurada segons l’aplicació. Els motors pas a pas són similars als commutats motors de reticència. El motor pas a pas utilitza la teoria del funcionament dels imants per fer que l’eix del motor giri a una distància precisa quan es proporciona un pols d’electricitat. L’estator té vuit pols i el rotor té sis pols. El rotor requerirà 24 polsos d’electricitat per moure els 24 passos per fer una revolució completa. Una altra manera de dir-ho és que el rotor es mourà amb precisió 15 ° per cada pols d’electricitat que rep el motor.
Principi de construcció i treball
El construcció d’un motor pas a pas està bastant relacionat amb un DC motor . Inclou un imant permanent com el rotor que es troba al centre i girarà una vegada que hi actuï la força. Aquest rotor es tanca a través d’un núm. de l’estator que s’enrotlla a través d’una bobina magnètica. L'estator està disposat a prop del rotor de manera que els camps magnètics dels estators puguin controlar el moviment del rotor.

Motor pas a pas
El motor pas a pas es pot controlar alimentant cada estator un a un. De manera que l’estator s’imantarà i funcionarà com un pol electromagnètic que fa servir energia repulsiva al rotor per avançar. La magnetització alternativa de l’estator, així com la seva desmagnetització, canviaran el rotor gradualment i li permetrà passar un gran control.
El principi de funcionament del motor pas a pas és l’electromagnetisme. Inclou un rotor fabricat amb un imant permanent, mentre que un estator és amb electroimants. Una vegada que es proporciona el subministrament al bobinatge de l'estator, el camp magnètic es desenvoluparà dins de l'estator. Ara el rotor del motor començarà a moure’s amb el camp magnètic giratori de l’estator. Per tant, aquest és el principi fonamental de funcionament d’aquest motor.

Construcció de motors pas a pas
En aquest motor, hi ha un ferro tou que es tanca a través dels estators electromagnètics. Els pols de l’estator i del rotor no depenen del tipus de pas a pas. Un cop els estators d’aquest motor s’energitzen, el rotor girarà per alinear-se amb l’estator en cas contrari, gira per tenir el menor espai a través de l’estator. D'aquesta manera, els estators s'activen en una sèrie per fer girar el motor pas a pas.
Tècniques de conducció
Tècnica de conducció del motor pas a pas Pot ser possible amb alguns circuits especials a causa del seu complex disseny. Hi ha diversos mètodes per accionar aquest motor, alguns d’ells es descriuen a continuació prenent un exemple de motor pas a pas de quatre fases.
Mode d'excitació única
El mètode bàsic per conduir un motor pas a pas és un mode d’excitació únic. És un mètode antic i actualment no s’utilitza molt, però cal conèixer aquesta tècnica. En aquesta tècnica, totes les fases estatores una al costat de l'altra s'activaran una per una alternativament amb un circuit especial. Això magnetitzarà i desmagnetitzarà l’estator per moure el rotor cap endavant.
Unitat de pas complet
En aquesta tècnica, s’activen dos estators alhora en lloc d’un en un període de temps molt inferior. Aquesta tècnica resulta en un parell elevat i permet que el motor condueixi la càrrega elevada.
Unitat de mig pas
Aquesta tècnica està bastant relacionada amb la unitat de pas complet perquè els dos estators es disposaran l'un al costat de l'altre de manera que s'activarà primer, mentre que el tercer s'activarà després. Aquest tipus de cicle per canviar dos estators primer i després d’aquest tercer estator conduirà el motor. Aquesta tècnica permetrà millorar la resolució del motor pas a pas mentre disminueix el parell.
Micro Stepping
Aquesta tècnica s’utilitza amb més freqüència per la seva precisió. El corrent de pas variable serà subministrat per circuit de control de motor pas a pas cap a les bobines de l’estator en forma de forma d’ona sinusoïdal. La precisió de cada pas es pot millorar amb aquest petit pas de corrent. Aquesta tècnica s’utilitza àmpliament perquè proporciona una alta precisió i disminueix en gran mesura el soroll de funcionament.
Circuit de motor pas a pas i el seu funcionament
Els motors pas a pas funcionen de manera diferent Motors de raspall continu , que giren quan s'aplica tensió als seus terminals. Els motors pas a pas, en canvi, tenen efectivament diversos electroimants dentats disposats al voltant d’una peça de ferro en forma d’engranatge central. Els electroimants són alimentats per un circuit de control extern, per exemple, un microcontrolador.

Circuit de motor pas a pas
Per fer girar l’eix del motor, primer es dóna poder a un electroimant, cosa que fa que les dents de l’engranatge siguin atretes magnèticament per les dents de l’electroimant. En el moment en què les dents de l’engranatge estan alineades amb el primer electroimant, queden lleugerament compensades respecte al següent electroimant. Així, quan l’electroimant següent s’encén i el primer s’apaga, l’engranatge gira lleugerament per alinear-se amb el següent i a partir d’aquí es repeteix el procés. Cadascuna d'aquestes lleugeres rotacions s'anomena pas, amb un nombre enter de passos que fan una rotació completa.
D'aquesta manera, el motor es pot girar amb una precisió. El motor pas a pas no gira contínuament, gira per graons. Hi ha 4 bobines amb un 90oangle entre si fixat a l’estator. Les connexions del motor pas a pas es determinen per la manera d’interconnexió de les bobines. En un motor pas a pas, les bobines no estan connectades. El motor té un 90opas de rotació amb les bobines que s’energitzen en un ordre cíclic, determinant la direcció de rotació de l’eix.
El funcionament d’aquest motor es mostra mitjançant l’interruptor. Les bobines s’activen en sèrie en intervals d’1 segon. L’eix gira 90ocada vegada que s’activa la següent bobina. El seu parell de baixa velocitat variarà directament amb el corrent.
Tipus de motor pas a pas
Hi ha tres tipus principals de motors pas a pas:
- Pas imant permanent
- Pas a pas síncron híbrid
- Pas a pas de reticència variable
Motor pas a pas amb imant permanent
Els motors d’imant permanent utilitzen un imant permanent (PM) al rotor i funcionen a l’atracció o repulsió entre el rotor PM i els electroimants de l’estator.
Aquest és el tipus de motor pas a pas més comú en comparació amb els diferents tipus de motors pas a pas disponibles al mercat. Aquest motor inclou imants permanents en la construcció del motor. Aquest tipus de motor també es coneix com a motor de llauna / apilable. El principal avantatge d’aquest motor pas a pas és un menor cost de fabricació. Per a cada revolució, té 48-24 passos.
Motor pas a pas de reluctància variable
Els motors de reluctància variable (VR) tenen un rotor de ferro normal i funcionen basant-se en el principi que la reluctància mínima es produeix amb un espai mínim, per tant els punts del rotor s’atrauen cap als pols de l’imant de l’estator.
El motor pas a pas com la reluctància variable és el tipus bàsic de motor i s’utilitza durant els darrers anys. Com el seu nom indica, la posició angular del rotor depèn principalment de la reticència del circuit magnètic que es pugui formar entre les dents de l’estator i també d’un rotor.
Motor pas a pas síncron híbrid
Els motors pas a pas híbrids s’anomenen perquè utilitzen una combinació d’imants permanents (PM) i tècniques de reluctància variable (VR) per aconseguir la màxima potència en envasos petits.
El tipus de motor més popular és el motor pas a pas híbrid perquè proporciona un bon rendiment en comparació amb un rotor d’imant permanent en termes de velocitat, resolució de pas i parell de subjecció. Però aquest tipus de motor pas a pas és car en comparació amb els motors pas a pas amb imant permanent. Aquest motor combina les característiques dels motors pas a pas amb imant permanent i de reluctància variable. Aquests motors s’utilitzen quan es requereix menys angle de pas, com ara 1,5, 1,8 i 2,5 graus.
Com seleccionar un motor pas a pas?
Abans de seleccionar un motor pas a pas per al vostre requisit, és molt important examinar la corba parell-velocitat del motor. Per tant, aquesta informació està disponible al dissenyador del motor i és un símbol gràfic del parell motor a una velocitat especificada. La corba parell-velocitat del motor ha de coincidir estretament amb les necessitats de l’aplicació o, en cas contrari, no es pot obtenir el rendiment esperat del sistema.
Tipus de cablejat
Els motors pas a pas són generalment motors de dues fases com unipolars o bipolars. Per a cada fase d’un motor unipolar, hi ha dos bobinatges. Aquí, el punteig central és un conductor comú entre dos bobinatges cap a un pal. El motor unipolar té de 5 a 8 derivacions.
A la construcció, on el comú de dos pols es divideix per molt que sigui copejat al centre, aquest motor pas a pas inclou sis cables. Si les aixetes centrals de dos pols són curtes a l’interior, aquest motor inclou cinc cables. Unipolar amb 8 cables facilitarà la connexió tant en sèrie com en paral·lel, mentre que el motor amb cinc o sis cables té connexió en sèrie de la bobina de l’estator. El funcionament del motor unipolar es pot simplificar, ja que mentre es fa servir no es requereix invertir el flux de corrent dins del circuit de conducció que es coneix com a motors bifilars.
En un motor pas a pas bipolar, per a cada pol, hi ha un sol enrotllament. La direcció del subministrament ha de canviar a través del circuit motriu de manera que esdevingui complex, de manera que aquests motors s’anomenen motors unifilars.
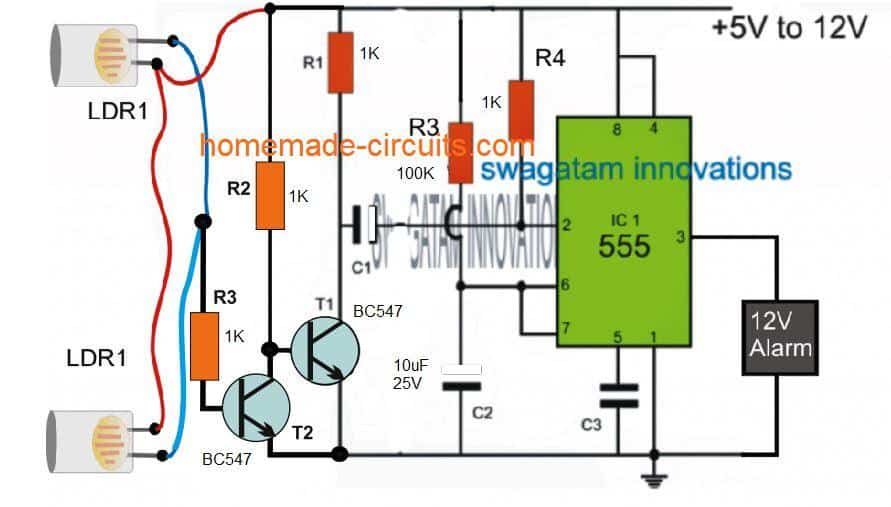
Control del motor pas a pas per impulsos de rellotge variables
Control del motor pas a pas El circuit és un circuit senzill i de baix cost, utilitzat principalment en aplicacions de baixa potència. El circuit es mostra a la figura, que consta de 555 temporitzadors IC com a multi-vibrador estable. La freqüència es calcula utilitzant la relació donada.
Freqüència = 1 / T = 1,45 / (RA + 2RB) C On RA = RB = R2 = R3 = 4,7 quilo-ohm i C = C2 = 100 µF.

Control del motor pas a pas per impulsos de rellotge variables
La sortida del temporitzador s’utilitza com a rellotge per a dues xancletes 7474 dobles ‘D’ (U4 i U3) configurades com a comptador d’anells. Quan s’encén l’alimentació, només s’estableix el primer xanclet (és a dir, la sortida Q al pin 5 de U3 estarà a la lògica '1') i es restabliran els altres tres xancles (és a dir, la sortida de Q està a la lògica 0). Quan es rep un impuls de rellotge, la sortida lògica ‘1’ del primer xanclet es canvia al segon xanclet (pin 9 de U3).
Per tant, la sortida lògica 1 continua canviant circularment amb cada pols de rellotge. Les sortides Q de les quatre xancletes s’amplifiquen mitjançant matrius de transistors Darling-ton dins de l’ULN2003 (U2) i es connecten als bobinatges del motor pas a pas taronja, marró, groc, negre a 16, 15,14, 13 d’ULN2003 i el vermell a + ve subministrament.
El punt comú del bobinatge està connectat a l'alimentació de + 12 V CC, que també està connectada al pin 9 de l'ULN2003. El codi de color utilitzat per als bobinats pot variar segons la marca. Quan s’encén l’alimentació, el senyal de control connectat al pin SET del primer xanclet i als pins CLR de les altres tres xancletes s’activa “baix” (a causa del circuit d’inici de reinici format per R1) -C1 combinació) per configurar el primer xanclet i restablir els tres xancles restants.
En restablir-se, la Q1 de l’IC3 passa a ser 'alta' mentre que la resta de sortides Q passa a 'baixa'. Es pot activar un restabliment extern prement el botó de restabliment. Prement el commutador de reinici, podeu aturar el motor pas a pas. El motor torna a començar a girar en la mateixa direcció deixant anar el commutador de reinici.
Diferència entre motor pas a pas i motor servo
Els servomotors són adequats per a aplicacions de parell i velocitat elevats, mentre que el motor pas a pas és menys costós, de manera que s’utilitzen quan es requereix el parell de retenció elevat, l’acceleració de baix a mitjà, la flexibilitat oberta del funcionament en bucle tancat. La diferència entre el motor pas a pas i el servomotor inclou el següent.
| Motor pas a pas | servo Motor |
| El motor que es mou en passos discrets es coneix com a motor pas a pas. | Un servomotor és un tipus de motor de llaç tancat que es connecta a un codificador per proporcionar retroalimentació de velocitat i posició.
|
| El motor pas a pas s’utilitza on el control, així com la precisió, són les principals prioritats | El servomotor s’utilitza quan la velocitat és la prioritat principal
|
| El recompte general de pols del motor pas a pas oscil·la entre 50 i 100 | El recompte general de pols del servomotor oscil·la entre el 4 i el 12 |
| En un sistema de llaç tancat, aquests motors es mouen amb un impuls constant | Aquests motors necessiten un codificador per canviar els impulsos per controlar la posició.
|
| El parell és elevat en menys velocitat | El parell motor és baix en alta velocitat |
| El temps de posicionament és més ràpid en cops curts | El temps de posicionament és més ràpid al llarg de cops llargs |
| Moviment d'inèrcia d'alta tolerància | Moviment d'inèrcia de baixa tolerància |
| Aquest motor és adequat per a mecanismes de baixa rigidesa com la politja i la corretja | No és adequat per a mecanismes de menys rigidesa |
| La capacitat de resposta és alta | La capacitat de resposta és baixa |
| S’utilitzen per a càrregues fluctuants | No s’utilitzen per a càrregues fluctuants |
| No és necessari ajustar el guany / sintonització | Cal ajustar el guany / afinació |
Motor pas a pas vs motor CC
Tant el pas a pas com els motors de corrent continu s’utilitzen en diferents aplicacions industrials, però les principals diferències entre aquests dos motors són una mica confuses. Aquí enumerem algunes característiques comunes entre aquests dos dissenys. A continuació, es parla de cada característica.
Característiques | Motor pas a pas | DC Motor |
| Característiques del control | Senzill i utilitza microcontrolador | Senzill i no es requereixen extres |
| Rang de velocitat | Baixa de 200 a 2000 RPM | Moderat |
| Fiabilitat | Alt | Moderat |
| Eficiència | baix | Alt |
| Característiques de parell o velocitat | Parell màxim a menys velocitats | Parell elevat a menys velocitats |
| Cost | baix | baix |
Paràmetres del motor pas a pas
Els paràmetres del motor pas a pas inclouen principalment l’angle de pas, els passos per cada revolució, els passos per cada segon i RPM.
Angle de pas
L’angle de pas del motor pas a pas es pot definir com l’angle al qual gira el rotor del motor una vegada que es dóna un impuls únic a l’entrada de l’estator. La resolució del motor es pot definir com el nombre de passos del motor i el nombre de revolucions del rotor.
Resolució = Nombre de passos / Nombre de revolució del rotor
La disposició del motor es pot decidir mitjançant l’angle de pas i s’expressa en graus. La resolució d’un motor (el número de pas) és el núm. de passos que fan dins d'una sola revolució del rotor. Quan l’angle de pas del motor és petit, la resolució és elevada per a la disposició d’aquest motor.
L'exactitud de les disposicions dels objectes a través d'aquest motor depèn principalment de la resolució. Un cop la resolució sigui alta, la precisió serà baixa.
Alguns motors de precisió poden crear 1000 esglaons en una sola revolució, inclosos 0,36 graus d'angle de pas. Un motor típic inclou 1,8 graus d’angle de pas amb 200 esglaons per cada revolució. Els diferents angles de pas com ara 15 graus, 45 graus i 90 graus són molt comuns en motors normals. El nombre d'angles pot canviar de dos a sis i es pot assolir un petit angle de pas a través de parts de pols ranurades.
Passos per a cada revolució
Els passos per a cada resolució es poden definir com el nombre d'angles de pas necessaris per a una revolució total. La fórmula per a això és 360 ° / angle de pas.
Passos per a cada segon
Aquest tipus de paràmetre s'utilitza principalment per mesurar el nombre de passos coberts en cada segon.
Revolució per minut
El RPM és la revolució per minut. S'utilitza per mesurar la freqüència de revolució. Per tant, mitjançant aquest paràmetre, podem calcular el nombre de revolucions en un sol minut. La relació principal entre els paràmetres del motor pas a pas és la següent.
Passos per segon = revolució per minut x passos per revolució / 60
Interfície del motor pas a pas amb el microcontrolador 8051
La interfície del motor pas a pas amb el 8051 és molt senzilla mitjançant l’ús de tres modes, com ara la transmissió d’ones, la unitat de pas complet i la de mig pas, donant el 0 & 1 als quatre cables del motor en funció del mode de conducció que hem de triar per fer funcionar aquest motor.
Els dos cables restants han d’estar acoblats a una font de tensió. Aquí s'utilitza el motor pas a pas unipolar on els quatre extrems de les bobines estan connectats als quatre pins principals del port-2 del microcontrolador mitjançant l'ULN2003A.
Aquest microcontrolador no subministra corrent suficient per accionar les bobines, de manera que al controlador IC actual li agrada ULN2003A. Cal utilitzar ULN2003A i és la col·lecció de 7 parells de transistors Darlington NPN. El disseny del parell Darlington es pot fer a través de dos transistors bipolars connectats per aconseguir la màxima amplificació de corrent.
A l’ICN del controlador ULN2003A, els pins d’entrada són 7, els pins de sortida són 7, on hi ha dos pins per a la font d’alimentació i els terminals de terra. Aquí s’utilitzen pins de 4 entrades i 4 sortides. Com a alternativa a ULN2003A, el L293D IC també s’utilitza per amplificar el corrent.
Cal observar amb molta cura dos cables comuns i quatre cables de bobina, en cas contrari el motor pas a pas no girarà. Això es pot observar mesurant la resistència a través d’un multímetre, però el multímetre no mostrarà cap lectura entre les dues fases dels cables. Una vegada que el cable comú i els altres dos cables estiguin en la fase igual, ha de mostrar una resistència similar, mentre que els dos punts d’acabat de les bobines en la fase similar demostraran la doble resistència en comparació amb la resistència entre punts comuns i un punt final.
Resolució de problemes
- La solució de problemes és el procés per comprovar l’estat del motor, tant si el motor funciona com si no. La següent llista de comprovació s’utilitza per solucionar problemes del motor pas a pas.
- En primer lloc, verifiqueu les connexions i el codi del circuit.
- Si està bé, comproveu a continuació que el motor subministra una tensió adequada o simplement vibra, però no gira.
- Si el subministrament de tensió és correcte, comproveu els punts finals de les quatre bobines que s’associa a ULN2003A IC.
- En primer lloc, descobriu els dos extrems generals i fixeu-los en un subministrament de 12 V, després fixeu els quatre cables residuals a IC ULN2003A. Fins que no s'engegui el motor pas a pas, proveu de fer totes les combinacions possibles. Si la connexió no és adequada, aquest motor vibrarà en lloc de girar.
Els motors pas a pas poden funcionar contínuament?
En general, tots els motors funcionen o giren contínuament, però la majoria dels motors no poden parar mentre estan sota alimentació. Quan intenteu restringir l’eix d’un motor quan està sota alimentació, es cremarà o es trencarà.
Com a alternativa, els motors pas a pas estan dissenyats per fer un pas discret i, a continuació, espereu un altre pas i romangueu allà. Si volem que el motor es mantingui en una sola ubicació durant menys temps abans de tornar a passar, semblarà que giri contínuament. El consum d'energia d'aquests motors és elevat, però la dissipació de potència es produeix principalment una vegada que el motor està aturat o mal dissenyat, hi ha possibilitat de sobreescalfament. Per aquest motiu, el subministrament actual del motor es redueix sovint un cop el motor està en posició de manteniment durant més temps.
El motiu principal és que, una vegada que el motor gira, la seva part d’energia elèctrica d’entrada es pot canviar a una potència mecànica. Quan el motor s’atura mentre gira, llavors tota la potència d’entrada es pot convertir en calor a l’interior de la bobina.
Avantatges
El avantatges del motor pas a pas inclou el següent.
- Robustesa
- Construcció senzilla
- Pot funcionar en un sistema de control de bucle obert
- El manteniment és baix
- Funciona en qualsevol situació
- La fiabilitat és elevada
- L’angle de rotació del motor és proporcional al pols d’entrada.
- El motor té un parell total a l’aturada.
- Posicionament precís i repetibilitat del moviment, ja que els bons motors pas a pas tenen una precisió del 3 al 5% d’un pas i aquest error no es acumula d’un pas a l’altre.
- Excel·lent resposta a l’inici, l’aturada i la marxa enrere.
- Molt fiable ja que no hi ha raspalls de contacte al motor. Per tant, la vida del motor depèn simplement de la vida del rodament.
- La resposta del motor als polsos d’entrada digital proporciona un control de bucle obert, cosa que fa que el motor sigui més senzill i menys costós de controlar.
- És possible aconseguir una rotació síncrona a molt baixa velocitat amb una càrrega que s’acobla directament a l’eix.
- Es pot realitzar una àmplia gamma de velocitats de rotació ja que la velocitat és proporcional a la freqüència dels polsos d'entrada.
Desavantatges
El desavantatges del motor pas a pas inclou el següent.
- L’eficiència és baixa
- El parell d’un motor disminueix ràpidament amb la velocitat
- La precisió és baixa
- Els comentaris no s’utilitzen per especificar possibles passos perduts
- Relació de parell petit cap a la inèrcia
- Extremadament sorollós
- Si el motor no es controla correctament, es poden produir ressonàncies
- El funcionament d’aquest motor no és fàcil a velocitats molt altes.
- El circuit de control dedicat és necessari
- En comparació amb els motors de corrent continu, utilitza més corrent
Aplicacions
El aplicacions del motor pas a pas inclou el següent.
- Màquines industrials - Els motors pas a pas s’utilitzen en indicadors d’automoció i equips de producció automatitzada per a màquines-eina.
- Seguretat - nous productes de vigilància per a la indústria de la seguretat.
- Mèdic - Els motors pas a pas s’utilitzen dins d’escàners mèdics, mostrejadors i també es troben dins de fotografia dental digital, bombes de fluids, respiradors i maquinària per analitzar la sang.
- Electrònica de consum - Motors pas a pas en càmeres per a enfocament automàtic de la càmera digital i funcions de zoom.
I també tenen aplicacions de màquines comercials, aplicacions de perifèrics informàtics.
Per tant, tot això es tracta una visió general del motor pas a pas com la construcció, principi de funcionament, diferències, avantatges, desavantatges i les seves aplicacions. Ara teniu una idea sobre els tipus de súper motors i les seves aplicacions si teniu cap pregunta sobre aquest tema o elèctric i projectes electrònics deixeu els comentaris a continuació.
Crèdit fotogràfic
- Motor pas a pas per MST




{kind=link}