En general, un registre es pot definir com un dispositiu utilitzat per emmagatzemar les dades binàries, però si voleu emmagatzemar diversos bits de dades, s'utilitzen un conjunt de xancles connectades en sèrie. Les dades que s'emmagatzemen als registres es poden desplaçar utilitzant registres de desplaçament al costat dret o esquerre proporcionant polsos CLK. Registre de torns és un grup de xancletes s'utilitza per emmagatzemar diversos bits de dades. De la mateixa manera, es pot formar un registre de desplaçament amb n bits simplement connectant n xancletes allà on cada xancleta simplement emmagatzemi un únic bit de dades. Una vegada que el registre desplaça els bits cap a la dreta, és el registre de desplaçament a la dreta, mentre que si es desplaça cap a l'esquerra, es coneix com a registre de desplaçament a l'esquerra. Aquest article tracta una visió general d'un dels tipus de registre de desplaçament, és a dir, en sèrie en paral·lel, registre de desplaçament o Registre de torn SIPO .
Què és SIPO Shift Register?
El registre de desplaçament que permet la sortida en paral·lel d'entrada en sèrie es coneix com a registre de desplaçament SIPO. En el registre SIPO, el terme SIPO significa entrada sèrie sortida paral·lela. En aquest tipus de registre de desplaçament, les dades d'entrada es donen bit a bit en sèrie. Per a cada pols de rellotge, les dades d'entrada de tots els FF es poden desplaçar en una única posició. L'o/p a cada flip-flop es pot rebre en paral·lel.
Esquema de connexions
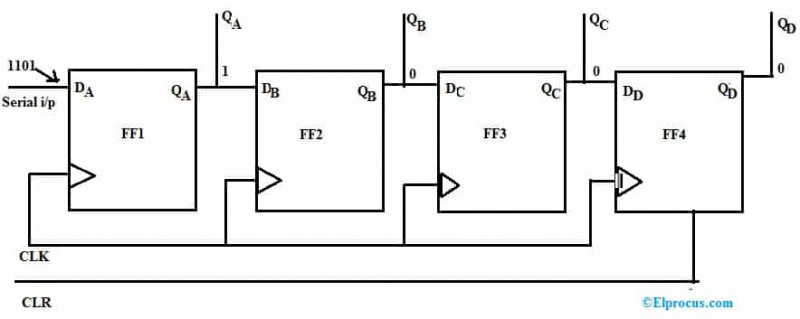
El Diagrama del circuit del registre de desplaçament SISO es mostra a continuació. Aquest circuit es pot construir amb flip-flops de 4 D que es connecten tal com es mostra al diagrama on el senyal CLR es dóna addicionalment al senyal CLK a tots els FF o RESET. Al circuit anterior, la primera sortida FF es dóna a la segona entrada FF. Tots aquests quatre flip-flops D estan connectats entre si en sèrie perquè es dóna el mateix senyal CLK a tots els flip-flops.
Funcionament del registre de torns SIPO
El funcionament del registre de torns SIPO és; que pren l'entrada de dades en sèrie del primer flip flop del costat esquerre i genera una sortida de dades paral·leles. A continuació es mostra el circuit de registre de desplaçament SIPO de 4 bits. El funcionament d'aquest registre de desplaçament és que, primer, totes les xancletes del circuit de FF1 a FF4 s'han de RESET perquè totes les sortides de FF com QA a QD estiguin al nivell zero lògic, de manera que no hi hagi sortida de dades paral·leles.
La construcció del registre de desplaçament SIPO es mostra a dalt. Al diagrama, la primera sortida de flip flop 'QA' està connectada a la segona entrada de flip flop 'DB'. La segona sortida de xancletes 'QB' està connectada a la tercera entrada de xancletes DC, i la tercera sortida de xancletes 'QC' està connectada a la quarta entrada de xancletes 'DD'. Aquí, QA, QB, QC i QD són sortides de dades.
Inicialment, tota la sortida es convertirà en zero, per tant sense pols CLK; totes les dades es convertiran en zero. Prenguem un exemple d'entrada de dades de 4 bits com el 1101. Si apliquem el primer pols de rellotge '1' al primer flip flop, les dades que s'han d'introduir al FF i QA es converteixen en '1', i quedant totes les sortides com QB. , QC i QD es convertiran en zero. Així que la primera sortida de dades és '1000'
Si apliquem el segon pols de rellotge com a '0' al primer flip flop, llavors QA es converteix en '0', QB es converteix en '0', QC es converteix en '0' i QD en '0'. Així, la segona sortida de dades es convertirà en '0100' a causa del procés de canvi a la dreta.
Si apliquem el tercer pols de rellotge com a '1' al primer flip flop, llavors QA es converteix en '1', QB es converteix en '0', QC es converteix en '1' i QD en '0'. Així, la tercera sortida de dades es convertirà en '1011' a causa del procés de canvi a la dreta.
Si apliquem el quart pols de rellotge com a '1' al primer flip flop, llavors QA es converteix en '1', QB es converteix en '1', QC es converteix en '0' i QD es converteix en '1'. Així, la tercera sortida de dades es convertirà en '1101' a causa del procés de canvi a la dreta.
Taula de veritat del registre de canvi SIPO
La taula de veritat del registre de desplaçament SIPO es mostra a continuació.
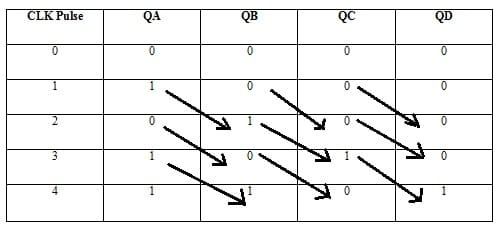
Diagrama de temps
El diagrama de temps del registre de desplaçament SIPO es mostra a continuació.
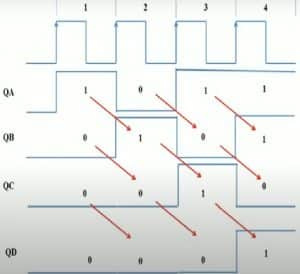
Aquí estem utilitzant un senyal CLK i/p de vora positiu. En un primer pols de rellotge, les dades d'entrada es converteixen en QA = '1' i tots els altres valors com QB, QC i QD es converteixen en '0'. Així, la sortida es convertirà en '1000'. En el segon pols de rellotge, la sortida es convertirà en '0101'. En el tercer pols de rellotge, la sortida es convertirà en '1010' i en el quart pols de rellotge, la sortida es convertirà en '1101'.
Codi Verilog del registre de torn SIPO
A continuació es mostra el codi Verilog per al registre de desplaçaments SIPO.
mòdul sipomod (clk,clear, si, po);
entrada clk, si,clear;
sortida [3:0] po;
reg [3:0] tmp;
reg [3:0] po;
sempre @(posege clk)
començar
si (clar)
tmp <= 4’b0000;
altra cosa
tmp <= tmp << 1;
tmp[0] <= si;
po = tmp;
final
mòdul final
74HC595 IC SIPO Circuit de registre de canvis i el seu funcionament
Un 74HC595 IC és un registre de desplaçament de sortida en paral·lel en sèrie de 8 bits, de manera que utilitza entrades en sèrie i proporciona sortides paral·leles. Aquest IC inclou 16 pins i està disponible en diferents paquets com SOIC, DIP, TSSOP i SSOP.
La configuració del pin del 74HC595 es mostra a continuació, on es comenta cada pin a continuació.
Pins 1 a 7 i 15 (QB a QH i QA): Aquests són els pins o/p que s'utilitzen per connectar dispositius de sortida com pantalles de 7 segments i LED.
Pin8 (GND): Aquest pin GND es connecta simplement al pin GND de la font d'alimentació del microcontrolador.
Pin9 (QH): Aquest pin s'utilitza per connectar-se al pin SER d'un IC diferent i donar el mateix senyal CLK a tots dos IC perquè funcionin com un únic IC que inclou 16 sortides.
Pin16 (Vcc): Aquest pin s'utilitza per connectar-se al microcontrolador, en cas contrari, font d'alimentació perquè és un IC de nivell lògic de 5 V.
Pin14 (SER): És el pin Serial i/p on les dades s'introdueixen en sèrie al llarg d'aquest pin.
Pin11 (SRCLK): És el PIN CLK del registre de canvi que funciona com el CLK per al registre de canvi perquè el senyal CLK es dóna a tot aquest pin.
Pin12 (RCLK): És el pin del registre CLK que s'utilitza per observar o/ps als dispositius connectats a aquests circuits integrats.
Pin10 (SRCLR): És el pin CLR del registre de canvi. Aquest pin s'utilitza principalment quan necessitem esborrar l'emmagatzematge del registre.
Pin13 (OE): És el pin d'activació o/p. Una vegada que aquest pin s'estableix a HIGH, el registre de desplaçament s'estableix en una condició d'alta impedància i no es transmet o/ps. Si posem aquest pin a baix, podem obtenir l'o/ps.
74HC595 IC Funcionant
A continuació es mostra l'esquema de circuit del 74HC595 IC per controlar els LED. Els 3 pins del registre de desplaçament són necessaris per connectar-se a Arduino com els pins 11, 12 i 14. Tots els vuit LED es connectaran simplement a aquest IC de registre de desplaçament.
Els components necessaris per dissenyar aquest circuit inclouen principalment un IC de registre de canvi 74HC595, Arduino UNO, font d'alimentació de 5 V, placa de prova, 8 LED, resistències de 1 KΩ - 8 i cables de connexió.
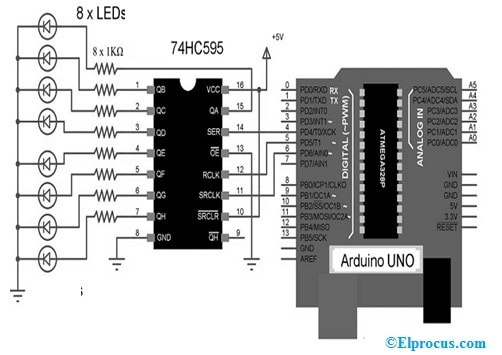
Primer, el pin serial i/p del registre de canvis s'ha de connectar al pin-4 d'Arduino Uno. Després d'això, connecteu els pins CLK i el tancament com els pins 11 i 12 de l'IC als pins 5 i 6 d'Arduino Uno respectivament. Els LED es connecten mitjançant resistències limitadores de corrent d'1KΩ als pins 8-o/p de l'IC. S'utilitza una font d'alimentació separada de 5 V per a 74HC595 IC amb GND comú a Arduino abans de subministrar 5 V des d'Arduino.
Codi
A continuació es mostra el codi senzill per activar 8 LED ON en una sèrie.
int latchPin = 5;
int clkPin = 6;
int dataPin = 4;
byte LED = 0;
void setup ()
{
Serial.begin(9600);
pinMode(latchPin, OUTPUT);
pinMode(dataPin, OUTPUT);
pinMode (clkPin, SORTIDA);
}
bucle buit ()
{
int i=0;
LED = 0;
shiftLED();
retard (500);
per (i = 0; i < 8; i++)
{
conjunt de bits (LED, i);
Serial.println (LED);
shiftLED();
retard (500);
}
}
void shiftLED()
{
digitalWrite(latchPin, LOW);
shiftOut (dataPin, clkPin, MSBFIRST, LED);
digitalWrite(latchPin, HIGH);
}
El funcionament d'aquest circuit de registre de desplaçament és que, al principi, tots els 8 LED s'apagaran perquè el LED de la variable de bytes està posat a zero. Ara, cada bit s'estableix a 1 amb la funció 'bitSet' i es desplaça amb la funció 'shiftOut'. De la mateixa manera, tots els LED s'encendran en la mateixa sèrie. Si voleu apagar el LED, podeu utilitzar la funció 'bitClear'.
El 74HC595 Shift Register IC s'utilitza en diferents aplicacions com servidors, control LED, control industrial, aparells electrònics, commutadors de xarxa, etc.
Aplicacions
El aplicacions del registre de desplaçament de sortida paral·lel d'entrada sèrie es mostra a continuació.
- Generalment, el registre de desplaçament s'utilitza per emmagatzemar dades temporals, utilitzades com a ring & Johnson Comptador de timbres .
- S'utilitzen per transferir dades i manipular.
- Aquestes xancletes s'utilitzen principalment dins de les línies de comunicació sempre que sigui necessària una demultiplexació de línies de dades en nombroses línies paral·leles perquè aquest registre de desplaçament s'utilitza per canviar les dades de sèrie a paral·lel.
- S'utilitzen per xifrar i desxifrar dades.
- Aquest registre de desplaçament s'utilitza dins de CDMA per generar codi PN o número de seqüència de pseudo soroll.
- Els podem utilitzar per fer un seguiment de les nostres dades!
- El registre de desplaçament SIPO s'utilitza en diverses aplicacions digitals per a la conversió de dades.
- De vegades, aquest tipus de registre de desplaçament es connecta simplement al microprocessador una vegada que calen més pins GPIO.
- L'aplicació pràctica d'aquest registre de desplaçament SIPO és donar les dades de sortida del microprocessador a un indicador de panell remot.
Per tant, aquesta és una visió general del SIPO registre de torn – Circuit, funcionament, taula de veritat i diagrama de temps amb aplicacions. Els components del registre de desplaçament SIPO més utilitzats són 74HC595, 74LS164, 74HC164/74164, SN74ALS164A, SN74AHC594, SN74AHC595 i CD4094. Aquests registres són d'ús molt ràpid, les dades es poden convertir molt fàcilment de sèrie a paral·lel i el seu disseny és senzill. Aquí teniu una pregunta per a vosaltres, què és el registre de desplaçament PISO.