En aquesta època de automatització industrial , els robots s'utilitzen per manejar diversos processos per obtenir una producció precisa i millor. Triar el motor ideal per a un robot perfecte sempre és una tasca difícil mentre es dissenya el robot especialment per a indústries. Selecció adequada de motors elèctrics en robots industrials es requereixen diversos paràmetres per tenir en compte el control del braç, la posició, els moviments angulars i lineals.

Motors utilitzats en robòtica industrial
La selecció del motor és el concepte menys entès per als aficionats a la robòtica que requereixen una anàlisi seriosa i estratègica, que consisteix a determinar la velocitat, l’acceleració, els requisits de parell del robot basats en el pes del robot, la mida de la roda i l’aplicació on s’ha d’implementar. Hi ha molts tipus de motors estan disponibles al mercat actual, però sobretot els motors de cerca petits, servomotors , motors lineals, motors pas a pas i els motors d’engranatges de corrent continu s’utilitzen en robots industrials segons la seva àrea d’aplicació.
La selecció incorrecta del motor acaba amb un robot per a minusvàlids, per tant, quin tipus de motor és el més adequat i adequat per fer que els robots industrials siguin reals, precisos i suficients per satisfer totes les necessitats de processos industrials tenint en compte totes les especificacions realistes?
Aquí recopilem algunes idees sobre aquests motors de professionals industrials per triar el motor corresponent a seleccionar per a aplicacions industrials.
Us animem a seguir les opinions dels experts que pretenen proporcionar els millors motors per a robòtica industrial amb motors de corrent continu, pas a pas, sense escombretes i servomotors per a moviments precisos, rendibles i fiables del robot.
Cap.Sampath Kumar
M.tech en disseny VLSI
Escriptor de continguts tècnics
 Els motors de corrent continu estan disponibles a amplis rangs per a un funcionament continu, però requereixen reduccions d’engranatges per a l’aplicació corresponent. El motor pas a pas no requereix cap reducció d’engranatges, ja que el seu funcionament escalonat proporciona una velocitat baixa per a aplicacions especificades. Per fi, els servomotors s’utilitzen per a un control precís i precís que s’implementa en operacions de bucle tancat. Però requereix retroalimentació addicional i circuits de conducció, de manera que és car que el motor de corrent continu i el pas a pas. De manera que els servomotors fan que el robot sigui més fiable a causa del seu moviment precís.
Els motors de corrent continu estan disponibles a amplis rangs per a un funcionament continu, però requereixen reduccions d’engranatges per a l’aplicació corresponent. El motor pas a pas no requereix cap reducció d’engranatges, ja que el seu funcionament escalonat proporciona una velocitat baixa per a aplicacions especificades. Per fi, els servomotors s’utilitzen per a un control precís i precís que s’implementa en operacions de bucle tancat. Però requereix retroalimentació addicional i circuits de conducció, de manera que és car que el motor de corrent continu i el pas a pas. De manera que els servomotors fan que el robot sigui més fiable a causa del seu moviment precís.
Viswanath Prathap
Màster en Enginyeria Elèctrica
Escriptor de continguts tècnics

Recollir i col·locar Els robots normalment es troben a les indústries per triar un objecte des d’una posició o lloc i col·locar-lo en una altra posició o lloc. Amb aquest propòsit, cal controlar els moviments angulars de les articulacions dels robots, que es poden aconseguir mitjançant servomotors. Aquests servomotors es controlen mitjançant dades PWM donades pel controlador robotitzat per accionar les juntes dels robots. Els servomotors són capaços de generar un parell suficient per moure un objecte ràpidament des de la posició de parada. Per tant, s’utilitzen com a rodes en vehicles robòtics militars i industrials. També es poden utilitzar motors pas a pas per controlar la posició, però aquests consumiran energia fins i tot en el període de descans, només per bloquejar i mantenir la posició ordenada. Per tant, els servomotors s’utilitzen normalment en robòtica industrial com a substitut d’alt rendiment dels motors pas a pas.
S. Naresh Reddy
M.tech al sistema incrustat
Guia del projecte
L'estructura del robot mecànic s'ha de controlar perfectament  rm tasca. Hi ha tres fases diferents per controlar el robot, com la percepció, el processament i l’acció. Els sensors proporcionen la informació sobre la posició de les seves articulacions i el seu efector final al robot, després aquesta informació es processa a la unitat de control i calcula el senyal adequat al motor que es mou mecànicament. La gran majoria dels robots utilitzen motors elèctrics. Els motors de corrent continu i sense escombretes s’utilitzen en robots portàtils i els motors de corrent altern s’utilitzen en robots industrials. Aquests motors són preferits en sistemes amb càrregues més lleugeres i on la forma de moviment predominant és la rotativa.
rm tasca. Hi ha tres fases diferents per controlar el robot, com la percepció, el processament i l’acció. Els sensors proporcionen la informació sobre la posició de les seves articulacions i el seu efector final al robot, després aquesta informació es processa a la unitat de control i calcula el senyal adequat al motor que es mou mecànicament. La gran majoria dels robots utilitzen motors elèctrics. Els motors de corrent continu i sense escombretes s’utilitzen en robots portàtils i els motors de corrent altern s’utilitzen en robots industrials. Aquests motors són preferits en sistemes amb càrregues més lleugeres i on la forma de moviment predominant és la rotativa.
Suresh Megaji
M. Tech en sistemes de comunicacions sense fils
Escriptor de continguts tècnics

Si voleu participar en la 'robòtica' i la seva aplicació a la 'indústria', heu de saber sobre 'Motors' que s'utilitzen en robòtica perquè la robòtica depèn principalment dels motors. Bàsicament, les 'màquines robòtiques' s'utilitzen per a diferents aplicacions de producció. S'utilitzen diferents motors com DC, Pulsed, Stepper, Drive òptic, gir parcial i motors d'efecte hall, etc., amb algunes tècniques per aplicar-los a la indústria i fer-los amables, com
- Els motors de corrent continu s’utilitzen per a aplicacions orientades a la bateria, velocitat més lenta i aplicacions de mobilitat.
- Sempre que necessitem una aplicació orientada a la rotació, podem utilitzar motors pas a pas com motors unipolars i bipolars.
- Per als moviments del cap i del braç, podem utilitzar motors de gir parcial.
- Si volem utilitzar camps magnètics, podem utilitzar efectes Hall i motors de disc òptic, etc.
Mitjançant l’ús de robòtica que utilitza motors intel·ligents, podem estalviar diners, temps, espai, moviments perillosos, etc.
Ajay Sahare
Executiu de màrqueting

Els robots industrials s’utilitzen en un entorn de fabricació industrial. Aquests són els braços desenvolupats específicament per a aplicacions com la soldadura, la manipulació de materials, la pintura i altres.
No tots els dispositius mecatrònics utilitzats en entorns industrials poden considerar-se un robot. Tal com es defineix per la ISO (International Standards Organization), un manipulador polivalent reprogramable i controlat automàticament programable en tres o més eixos es considera robot industrial.
Els motors utilitzats en robòtica industrial són
- Motors de corrent altern (CA)
- Motors de corrent continu (CC)
- Servomotors
- Motors pas a pas.
1. Els motors de corrent altern es poden subdividir en tipus asíncrons i síncrons. Per exemple, un motor de corrent altern d’inducció és una unitat de tipus asíncron que es compon bàsicament d’un estator enrotllat per filferro i un rotor. La potència està connectada al fil i el corrent de corrent altern que el travessa indueix un camp electromagnètic (EM) al filferro enrotllat, amb un camp prou fort que proporciona la força per al moviment del rotor. Els motors síncrons són motors de velocitat constant que funcionen en sincronisme amb la freqüència de línia de corrent altern i s’utilitzen habitualment quan es requereix una velocitat constant precisa.
2. Moltes aplicacions industrials, inclosa la robòtica, fan ús de motors de corrent freqüent a causa de la facilitat de controlar la velocitat i la direcció. Són capaços d’abastar una velocitat infinita, des de la màxima velocitat fins a zero, amb una àmplia gamma de càrregues.
Com que els motors de corrent continu presenten una elevada relació de parell i inèrcia, poden respondre ràpidament als canvis en els senyals de control. Un motor de corrent continu es pot controlar sense problemes a moviment zero i accelerar-se instantàniament en la direcció oposada sense necessitat de complexos circuits de commutació de potència. Els motors de corrent continu amb imant permanent sense escombretes solen ser més cars que els tipus de raspall, tot i que poden proporcionar avantatges en el consum d'energia i la fiabilitat.
Sense un commutador, els motors sense escombretes poden funcionar de manera més eficient i a velocitats més altes que els motors de corrent continu convencionals. La majoria dels motors de corrent continu sense escombretes funcionen amb una forma d’ona de CA trapezoïdal, però alguns dels motors funcionen amb ones sinusoïdals. Els motors sense escombretes impulsats per onades sinusòries poden aconseguir un funcionament suau a velocitats inferiors amb una ondulació de parell reduït, cosa que els fa ideals per a la mòlta, el recobriment i altres aplicacions com l'acabat de superfícies.
En cas de motors de corrent continu, si voleu que el motor giri més lentament sense perdre energia, podeu utilitzar la modulació d’amplada de pols (PWM). Això significa bàsicament engegar i apagar el motor molt ràpidament. D’aquesta manera, el motor gira amb una velocitat inferior, com si s’apliqués una tensió inferior sense tenir cura de la potència.
Bàsicament, el parell generat per un motor de corrent continu és massa petit i la velocitat és massa gran per ser útil. Per tant, les reduccions d’engranatges s’utilitzen normalment per reduir la velocitat i augmentar el parell.
3. Els servomotors s’utilitzen en sistemes de llaç tancat amb un controlador digital. El controlador envia ordres de velocitat a un amplificador de controlador, que al seu torn alimenta el servomotor. Alguna forma de dispositiu de retroalimentació, com ara un resoledor o un codificador, proporciona informació sobre la posició i la velocitat del servomotor. El resoledor o el codificador es poden integrar amb el motor o situar-se remotament. A causa del sistema de llaç tancat, un servomotor pot funcionar amb un perfil de moviment específic que es programa al controlador.
4. Els motors pas a pas poden funcionar amb retroalimentació o sense, amb la rotació del motor dividida en petits passos angulars. Es controla mitjançant senyals de comandament polsats i es pot aturar amb precisió en un punt comandat sense necessitat de frens ni conjunts d’embragatge. Quan s’elimina l’alimentació, un motor pas a pas d’imant permanent roman generalment a la seva última posició. Es poden mantenir diversos motors pas a pas sincronitzats conduint-los des d’una font comuna.
Dev desai
Executiu de màrqueting 
Si teniu previst involucrar-vos en la robòtica, haureu de familiaritzar-vos amb els molts tipus de motors disponibles. Tot el moviment de la robòtica està motoritzat d’una manera o altra, per la qual cosa és important saber quina opció teniu.
Motors DC
A més de funcionar amb bateria, la direcció del moviment d’un motor de corrent continu es determina per la polaritat de l’entrada d’alimentació. Aquesta és una necessitat absoluta per a les funcions robòtiques. Afortunadament, aquest tipus de motor presenta una gran varietat de mides, requisits de tensió i està disponible a tot arreu.
Els diferents tipus de motors són els següents
- Motor base de mobilitat
- Motor hobby d'alta velocitat
- Motor de transmissió per corretja
- Motor de cotxes de ranura
- Funciona amb pols
- Motor adaptat al braç
- Pas bipolar amb punter
bio Motor
El bio-metall és una substància increïble que existeix des de fa uns quants anys i que té diverses aplicacions en el camp de la robòtica. Podem veure a la il·lustració que un tros de filferro bio-metàl·lic es reduirà un cinc per cent de la seva longitud quan només s’hi apliquin uns quants volts. Després d’anys de proves, el filferro biològic ha demostrat ser fort, fiable i cada vegada és més útil a mesura que apareixen nous productes. El seu temps de resposta una mica més lent el fa ideal per a aplicacions robotitzades de braços i mans, on la molèstia seria problemàtica. Un llarg tros de filferro pot produir un moviment significatiu quan s’estira tota la longitud d’un braç robòtic. Actualment, al mercat comercial hi ha kits de braços robòtics que utilitzen el bio metall.
Relleus
El relé, en robòtica, s'utilitza gairebé sempre per aïllar la potència destinada als motors, de la font d'alimentació per a la funció de l'ordinador. Els motors, a causa de la seva baixa impedància, requereixen intensitat de corrent a les fonts d’alimentació i creen múltiples problemes que els ordinadors no poden tolerar. Per tant, és una bona idea utilitzar una font d’alt corrent separada només per a motors.
Solenoides
Els solenoides s’utilitzen millor com a dispositius de control de manipuladors o com a operadors de commutació. El seu moviment és ràpid i fort, de manera que gairebé sempre s’utilitza una molla a les pinces per suavitzar l’acció. Com podeu veure a la il·lustració, s’utilitzen cables de control per tancar la pinça. Aquests cables de control també poden actuar com a molls de retorn. Comptes com aquest es troben més en el treball de la línia de producció on la tasca és molt mesurada i cobreix paràmetres estrets.
Funcions secundàries
La majoria de les funcions motores impliquen mobilitat, braç, cap o algun altre moviment extern visible, però alguns moviments motors no són tan visibles. Els grans robots industrials utilitzen sistemes hidràulics que fan servir motors de bombes per produir una pressió de funcionament d’un fluid hidràulic. Una altra funció secundària important dels motors és l’ajust controlat. Per millorar la precisió, els potenciòmetres que s’interfacen amb motors solen ser dispositius de diversos girs.
Conclusió
Els robots poden ser dispositius molt complexos que requereixen una gran varietat de moviments motoritzats. Aquest article té la intenció de donar una visió general de la gamma de dispositius amb els quals podeu tractar com a constructor de robots. Seria una bona idea començar per investigar sobre proveïdors d’equips robòtics i subministraments disponibles. Ara hi ha una gran quantitat de productes disponibles i Internet facilita la cerca, l’aprenentatge i l’ús. Siguin quines siguin les vostres necessitats, us ha de servir una mica d’enginy i la determinació que semblen tenir tots els constructors de robots.
Samadan Wandre
Executiu de màrqueting
'Motors utilitzats en robòtica'
- Motor base de mobilitat

- Motor hobby d'alta velocitat
- Motor de transmissió per corretja
- Motor de cotxes escurabutxaques
- Funciona amb pols
- Motor adaptat al braç
- Pas bipolar amb punter

Els motors més grans són els més adequats per a bases de mobilitat que permeten als robots maniobrar el terreny. Alguns d'aquests motors vénen amb caixes de canvis per produir la velocitat i el parell més baixos necessaris per a la mobilitat. Baixar el voltatge a un motor també pot alentir-lo a una velocitat més desitjable. Només l’experimentació pot determinar si el motor funcionarà amb una tensió inferior. Si ho fa, us heu estalviat molts problemes, si no, hi ha altres maneres d’alentir els motors. Alguns motors d’alta velocitat es poden utilitzar si s’utilitzen engranatges sense fi o engranatges de cargol.
Un exemple de l’engranatge de cargol es pot veure a la il·lustració del braç robòtic. Quan el motor gira en el sentit de les agulles del rellotge, el conjunt del cargol s’estira cap al motor i el braç es contrau i, quan gira en sentit antihorari, el braç s’estén. Tot i que l’eix del motor gira ràpidament, l’acció del braç és considerablement més lenta a causa de la reducció del cargol. En aquesta següent il·lustració del circuit del motor, veiem un motor de CC controlat per un transistor de potència. Un commutador de relé (Double Pole Double Throw), determina la direcció. El transistor Q1 hauria de ser un transistor de potència que suporti la càrrega pesada d’un motor.
Motors impulsats
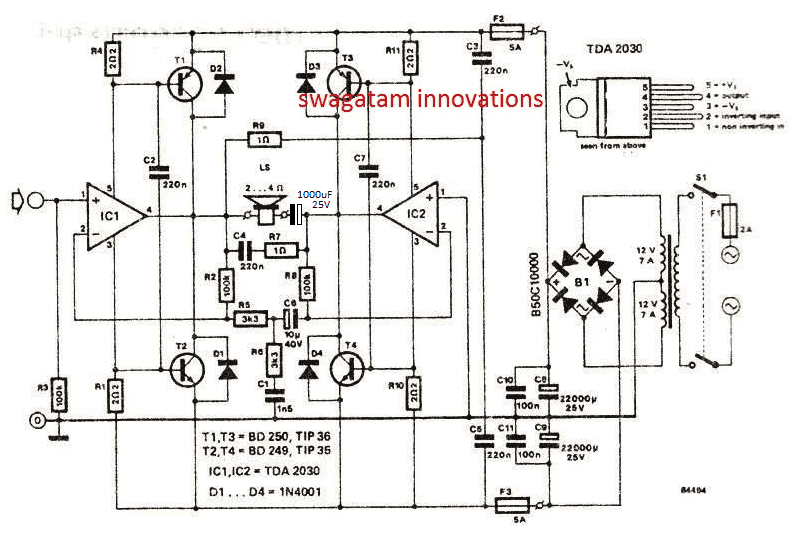
Alguns motors obtenen una reducció de velocitat funcionant a partir d’un senyal de CC pulsat. Aquest senyal sol ser d’uns cent Hz. La velocitat del motor es pot alterar canviant l’amplada del pols, no canviant la freqüència del pols. Motors com aquests es poden trobar a les botigues d’electrònica sobrants i es poden identificar fàcilment mitjançant el generador d’impulsos que hi està connectat. Tot i que qualsevol motor de corrent continu pot ser accionat per una font d’impulsos, s’inclou un esquema d’aquest circuit.
Com podeu veure, es va triar un temporitzador 555 com a oscil·lador de la unitat, que produeix una freqüència aproximada de 100 Hz. La resistència R1 i el condensador C estabilitzen i aïllen el generador d’impulsos de les puntes produïdes pel motor. Atès que aquest dispositiu pot obtenir una font d'alimentació de 6 a 12 volts, és possible que vulgueu canviar el valor del condensador C4 i C6 per obtenir millors resultats, en funció del voltatge que utilitzeu. La sortida de pols es pren del pin tres d'IC1 i s'alimenta al pin dos d'IC2, també un temporitzador 555.
El segon temporitzador varia l’amplada del pols ajustant la tensió que s’alimenta al condensador C6 mitjançant el potenciòmetre R5 i la resistència R6. La durada del pols és la que determina la velocitat del motor i l’amplada del pols es pot ajustar del 10% al 100%.
El transistor Q1 rep el senyal modulat d’amplada del pols a través de la resistència R7. Com que Q1 és un dispositiu de baix corrent, passa el senyal a Q2, un transistor de potència que pot gestionar les demandes actuals del motor. Aquests transistors no són crítics i funcionarà gairebé qualsevol tipus de transistor de baixa intensitat. El relé determinarà quina direcció prendrà el motor.
Motors pas a pas
El més complex de tots els motors és el motor pas a pas. Igual que el nom dedueix, el motor gira en increments de grau i funciona amb pols. El grau exacte de gir per pas pot variar d’un fabricant o model a un altre, però els 20 graus són populars i produeixen 18 passos per un gir complet. Hi ha dos tipus bàsics de motors pas a pas, bipolars i unipolars. Com podeu veure a l'esquema del motor pas a pas, el bipolar és simplement un motor de dues bobines.
El tipus unipolar és de dues bobines amb aixetes centrals. Si s’ignoren les aixetes centrals, el motor unipolar pot funcionar com a tipus bipolar. Les dues bobines d’un motor pas a pas s’alimenten de polsos de pas alternativament en polaritat de bobina a bobina. Es proporciona un mapa d’aquest procés al diagrama de treball per representar gràficament l’acció motora. A diferència dels motors de corrent continu convencionals, el parell disminueix amb la velocitat. També es requereix un tipus especial d’unitat motriu per avançar el motor pas a pas i s’ha de subministrar amb el motor. No es recomana construir una unitat de control tret que el motor tingui una bona fitxa d'especificacions que tingui recomanacions de components i un esquema complet.
El motor pot requerir memòries intermèdies per aïllar-lo del sistema de transmissió o pot necessitar una font d'alimentació independent. Siguin quines siguin les necessitats, poden variar considerablement d’un motor a un altre. Les botigues d’aficionats són els proveïdors més fiables de motors pas a pas i, tot i que ocasionalment hi ha excedents de botigues electròniques, és possible que no incloguin la informació específica necessària
Motors de gir parcial
Algunes funcions robòtiques només requereixen un gir parcial, com ara moviments del cap o del braç. La forma més senzilla d’aconseguir-ho és amb parades de posició i rodes dentades. A continuació es proporciona una il·lustració dels detalls mecànics d’aquest tipus de motors. Els microinterruptors es poden utilitzar com a sensors d’aturada per apagar l’alimentació i restablir la direcció de la següent acció.
La roda inferior està connectada al motor mentre que la roda superior està separada de la roda inferior per una peça circular de feltre. Quan la roda inferior gira, la roda superior gira amb ella fins que el pin d'aturada entra en contacte amb el microinterruptor. Alguns dissenys no preveuen dispositius per aturar el motor, de manera que els cargols simples amb separadors funcionaran com a aturades del motor.
Bio-Motor
El bio-metall és una substància increïble que existeix des de fa uns quants anys i que té diverses aplicacions en el camp de la robòtica. Podem veure a la il·lustració que un tros de filferro bio-metàl·lic es reduirà un cinc per cent de la seva longitud quan només s’hi apliquin uns quants volts. Després d’anys de proves, el filferro biològic ha demostrat ser fort, fiable i cada vegada és més útil a mesura que apareixen nous productes. El seu temps de resposta una mica més lent el fa ideal per a aplicacions robotitzades de braços i mans, on la molèstia seria problemàtica. Un llarg tros de filferro pot produir un moviment significatiu quan s’estira tota la longitud d’un braç robòtic. Actualment, al mercat comercial hi ha kits de braços robòtics que utilitzen el bio metall.
Bhaskar Singh
Executiu de màrqueting
 Els robots industrials són dispositius que fins a cert punt dupliquen el moviment humà juntament amb la reducció del perill, proporcionant més força, precisió i continuïtat. Necessiten una àmplia gamma de moviments motoritzats en funció dels seus modes operatius, control, eines utilitzades i treballs a realitzar. Un motor robotitzat industrial hauria de tenir el potencial de gestionar una àmplia gamma de funcions que els motors normals per especialitzar-se en una tasca particular.
Els robots industrials són dispositius que fins a cert punt dupliquen el moviment humà juntament amb la reducció del perill, proporcionant més força, precisió i continuïtat. Necessiten una àmplia gamma de moviments motoritzats en funció dels seus modes operatius, control, eines utilitzades i treballs a realitzar. Un motor robotitzat industrial hauria de tenir el potencial de gestionar una àmplia gamma de funcions que els motors normals per especialitzar-se en una tasca particular.
Els motors elèctrics s’utilitzen amb més freqüència en robòtica industrial a causa de l’abastiment d’energia altament eficient i el disseny relativament senzill, cosa que els fa una opció més popular en termes de rendibilitat en tots els aspectes: instal·lació, manteniment i manteniment.
Depenent del treball necessari, s'utilitzen diferents motors per a diferents propòsits. Per exemple, els motors de corrent continu s’utilitzen per a moviments en sentit horari i antihorari, els exemples es troben en grues i polipastos, els motors polsats s’utilitzen per proporcionar moviments pulsats mitjançant amplada de pols de CC, els motors de gir parcial s’utilitzen per proporcionar moviments com el cap i el braç i el més complex - Els motors pas a pas s’utilitzen per donar voltes escalonades en increments de graus.
A més, depenent del tipus de treball, s’utilitzen motors amb diferents qualificacions i mides per a diferents propòsits. Hi ha diversos tipus de motors que tenen aplicacions diferents en diferents llocs segons el treball i el disseny del robot.
Mohan Krishna. L
Executiu de vendes i assistència
Els robots s’utilitzen per fer la feina que podrien fer els humans i hi ha moltes raons per les quals els robots són millors que els humans. 
Hi ha dos tipus principals de robots que són: -
Robot mòbil: Que es mouen en cames o pistes.
Robot fix: Que té una base fixa.
Normalment, els robots estacionaris poden utilitzar-se per recollir objectes o fer alguna altra feina que impliqui arribar a un objecte.
Un braç de robot té tres parts bàsiques: -
- Articulació de l’espatlla
- Articulació del canell
- Base fixa
Necessiteu un robot per al
- Capacitat per treballar ràpidament i entorns perillosos.
- Possibilitat de repetir tasques una i altra vegada.
- Capacitat per treballar amb precisió.
- Capacitat per realitzar diferents tasques.
- Eficiència.
El motor és un dispositiu que converteix l’energia elèctrica en energia mecànica, és a dir, un dispositiu electromecànic. Hi ha dos tipus de motors, com ara el motor de corrent altern i el motor de corrent continu.
El motor utilitzat en robòtica industrial és el servomotor. El servomotor és un simple motor elèctric controlat amb l'ajut del mecanisme servo. Si el motor controlat és operat per CA, s'anomena Servomotor AC, en cas contrari Servomotor DC. La majoria dels servomotors poden girar entre 90 i 180 graus. Fins i tot alguns giren un màxim de 360 graus o més. Algunes de les aplicacions del servomotor en robòtica són
- Aplicació de servomotor en robot, és a dir, un robot senzill de triar i col·locar, s’utilitza per triar un objecte des d’una posició i col·locar l’objecte en una posició diferent.
- S'utilitzen servomotors als transportadors
- en unitats de fabricació i muntatge industrials per passar un objecte d'una estació de muntatge a una altra. Per exemple: - Un procés d'ompliment d'ampolles.
- Servomotor en vehicle robotitzat aquí el servomotor utilitzat a les rodes. Ja que s'utilitza el servomotor de rotació contínua.
Dinesh.P
Executiu de màrqueting
 S'introduiran robots per reduir els esforços humans i ajudar a crear bona fortuna per als humans per a futurs desenvolupaments. El terme robots significa la màquina que imita les diverses característiques humanes. La robòtica inclou els coneixements d’enginyeria mecànica, electrònica, elèctrica i informàtica. Els motors que s’utilitzen als robots són els motors DC, els motors pas a pas i els servomotors
S'introduiran robots per reduir els esforços humans i ajudar a crear bona fortuna per als humans per a futurs desenvolupaments. El terme robots significa la màquina que imita les diverses característiques humanes. La robòtica inclou els coneixements d’enginyeria mecànica, electrònica, elèctrica i informàtica. Els motors que s’utilitzen als robots són els motors DC, els motors pas a pas i els servomotors
On,
- Els motors de corrent continu s’utilitzen per a la rotació contínua
- Els motors pas a pas s’utilitzen per girar a pocs graus
- Els servomotors s’utilitzen per al posicionament, es poden utilitzar en cotxes i avions
Ganesh .J
Executiu de màrqueting 
Els robots s’utilitzen per fer la feina que podrien fer els humans i també redueixen l’esforç i el temps humans i milloren la qualitat.
- Motors de corrent altern (CA)
- Motors de corrent continu (CC)
- Servomotors
- Motors pas a pas.