En aquest post aprenem un circuit de temporitzador invers cap endavant per accionar un mecanisme de motor d’incubadora amb un conjunt de moviments preferit. La idea va ser sol·licitada pel senyor Anwar
Especificacions tècniques
Sóc d’Indonèsia ..... Necessito esquemes per al temporitzador d’incubadora amb motor d’alt parell (finestra del motor de corrent continu al cotxe). Estic intentant que un motor de corrent continu funcioni en dues direccions fins que arribi a la posició final i, a continuació, atureu-vos i canvieu la polaritat, de manera que funcionarà en l'altra direcció quan es torni a aplicar l'alimentació. Després feu el mateix a l’altre extrem.
1. el temporitzador encén durant 1 minut. (7:00 am -7: 01 am)
2. el motor funciona en una direcció fins que arriba a la posició de parada, per exemple, 30 segons.
3. l'alimentació del motor s'apaga quan arriba a la posició d'aturada i es retarda durant 1 minut. temporitzador per finalitzar / apagar l’alimentació principal. també inverteix la polaritat de manera que.
4. la propera vegada que s'encengui el temporitzador principal (10: 00-10: 01) dosifiqui el mateix en sentit invers i repetint contínuament
5. Inversió del motor de 12 V CC (només dos cables del motor + i -)
6. Necessiteu un indicador de led per al motor Rev / Fwd
Em podeu ajudar, senyor?
Gràcies per endavant per qualsevol ajuda.
Aquest és un projecte important per a la llar que ha de ser 100% fiable.
El disseny

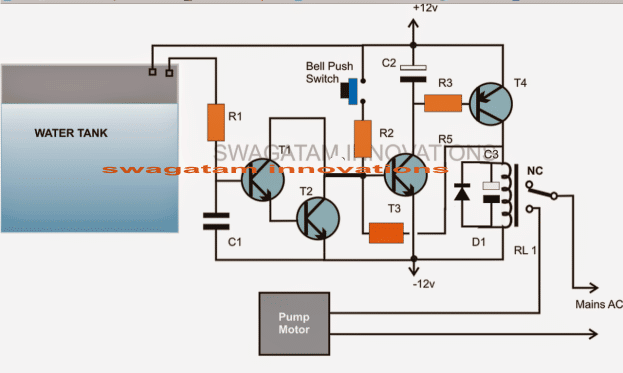
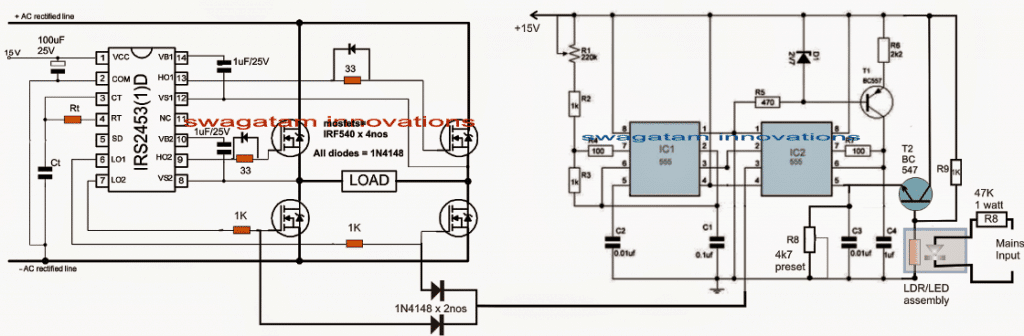
A la figura anterior podem visualitzar un disseny per implementar el moviment invers endavant proposat d’un motor d’incubadora després d’un conjunt predeterminat d’interval de temps.
En el moment en què s’encén l’alimentació, tenim el següent escenari:
Es pot suposar que l’interruptor magnètic per a “set” està en estat desactivat o deprimit mentre el motor o el mecanisme d’incubadora dissenyat es troba en la seva posició d’arrencada zero.
Tingueu en compte que preferiblement els commutadors 'set' / 'reset' s'han d'implementar mitjançant interruptors magnètics de canya.
Amb l’alimentació encesa, l’IC 4060 es restableix mitjançant C2 de manera que inicia el procés de comptatge des de zero i el pin3 es converteix en una lògica zero.
Aquesta lògica zero inicial s’alimenta a través de C3 a la base de T1 que instantàniament condueix forçant T3 i el seu relé associat a activar-se. R7 en el procés assegura que T1 / T3 es bloqueja en aquest mode.
El relé DPDT en aquest punt s'actua en els seus contactes N / O iniciant el motor i el mecanisme cap a un moviment 'endavant' suposat.
Tan bon punt el motor comença a moure’s, es deixa anar el botó “set” de manera que T4 i l’SPDT superior tenen l’oportunitat d’actuar, en què el relé SPDT aconsegueix un canvi de posició N / O que fa que els contactes N / C del DPDT estiguin en espera subministrament..
El motor i / o el mecanisme es mouen fins que ha assolit la posició de 'restabliment' que fa que T2 s'activi i trenqui el pestell T1 / T4.
Amb T4 apagat, el relé DPDT canvia la seva posició de N / O a N / C i proporciona un moviment oposat (invers) al mecanisme del motor.
El mecanisme del motor de la incubadora ara gira la seva direcció i inicia un moviment invers fins que ha arribat al punt “fixat” que apaga ràpidament la unitat base de T4, l’SPDT APAGA la potència de tall del DPDT i tot el mecanisme s’atura. .
Mentrestant, l'IC 4060 continua comptant fins que ha tornat a produir una lògica zero després de passar per una lògica alta al seu pin3 (descarregant C3).
El cicle torna a iniciar-se i repeteix el procediment tal com s'ha explicat anteriorment.
Anterior: Parpellejar un LED amb Arduino: tutorial complet Següent: S'explora el supressor de sobretensions de xarxa industrial d'alta potència