Introducció
Els motors d’inducció monofàsics s’utilitzen àmpliament en aparells i controls industrials. El motor d’inducció monofàsic del condensador dividit permanent (PSC) és el motor d’aquest tipus més senzill i utilitzat.
Pel disseny, els motors PSC són unidireccionals, el que significa que estan dissenyats per girar en una direcció. Afegint bobinatges addicionals, relés i commutadors externs o mitjançant mecanismes d'engranatges, es pot canviar el sentit de gir. En aquesta idea, discutirem detalladament com controlar la velocitat d’un motor PSC en ambdues direccions mitjançant un microcontrolador PIC16F72 i electrònica de potència.
Es va escollir el microcontrolador PIC16F72 perquè és un dels microcontroladors d’ús general més senzills i de baix cost que Microchip té a la seva cartera. Tot i que no disposa de PWM al maquinari per gestionar sortides PWM complementàries amb banda morta inserida, tots els PWM es generen al firmware mitjançant temporitzadors i la sortida als pins de sortida d’ús general.
Què és la unitat de freqüència variable?
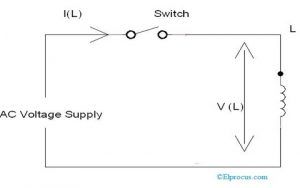
El variador de freqüència variable o VFD és la manera que permet controlar la velocitat del motor d’inducció aplicant una freqüència variable de la tensió d’alimentació de CA. Controlant la freqüència de sortida de CA, és possible conduir el motor a diferents velocitats segons els requisits. Es tracta de variadors de velocitat regulables que s’utilitzen en gran mesura en aplicacions industrials com ara bombes, sistemes de ventilació, elevadors, accionaments de màquines-eina, etc. Per tant, el primer requisit és generar una ona sinusoïdal amb diferents freqüències per a VFD.
Quina és la tecnologia adoptada en VFD?
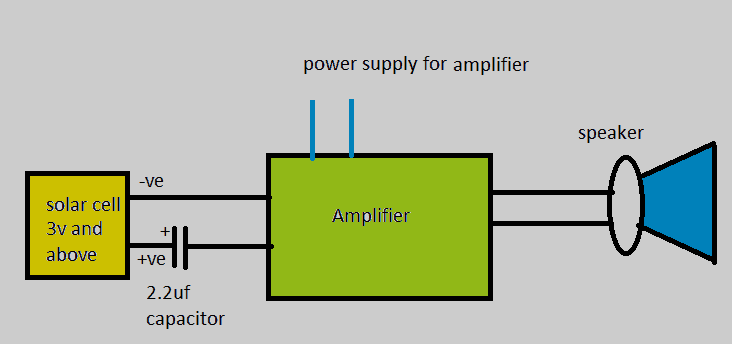
És el sistema que proporciona una sortida de corrent altern amb freqüència variable per controlar la velocitat del motor segons les necessitats. Els inversors de freqüència variable monofàsics són més freqüents, ja que la majoria dels dispositius funcionen amb subministrament de CA monofàsic. Consisteix en un rectificador de pont d’ona completa per convertir 230/110 Volt CA a aproximadament 300/150 volts CC. La sortida de CC del rectificador de pont es suavitza mitjançant un condensador de suavitzat d’alt valor per eliminar les ondulacions de corrent altern. Aquest voltatge fix de CC s’alimenta al circuit de generació de freqüència format per transistors MOSFET (transistor d’efecte de camp d’òxid de metall) / IGBT (transistor bipolar de porta aïllada). Aquest circuit MOSFET / IGBT rep el CC i el converteix en CA amb freqüència variable per controlar la velocitat del dispositiu.
El canvi de freqüència es pot aconseguir mitjançant circuits electrònics o microcontroladors. Aquest circuit varia la freqüència de tensió (PWM) aplicada a la unitat de porta del circuit MOSFET / IGBT. Així, apareix un voltatge de CA de freqüència variable a la sortida. El microcontrolador es pot programar per canviar la freqüència de la sortida segons les necessitats.
El sistema VFD:
El dispositiu de freqüència variable té tres parts, com ara un motor de CA, un controlador i una interfície de funcionament.
El motor de corrent altern utilitzat en VFD és generalment un motor d’inducció trifàsic encara que sigui monofàsic motor s’utilitza en alguns sistemes. Generalment s’utilitzen motors dissenyats per a un funcionament a velocitat fixa, però alguns dissenys de motors ofereixen un millor rendiment en VFD que el disseny estàndard.
La part del controlador és el circuit convertidor de potència electrònic sòlid per convertir CA a CC i després a quasi ona sinusoïdal CA. La primera part és la secció del convertidor de CA a CC que té un pont rectificador d’ona completa, normalment un pont d’ona completa de tres fases / monofàsic. Aquest intermedi de CC es converteix llavors en quasi ona sinusoïdal AC mitjançant el circuit de commutació de l’inversor. Aquí s’utilitzen transistors MOSFET / IGBT per invertir CC a CA.
La secció de l’inversor converteix la CC en tres canals de CA per accionar el motor trifàsic. La secció de controlador també es pot dissenyar per proporcionar un factor de potència millorat, menys distorsió harmònica i baixa sensibilitat als transitoris d'entrada d'AC.
Control de volts / Hz:
El circuit del controlador regula la freqüència de corrent altern subministrada al motor mitjançant el mètode de control de volts per Hz. El motor de corrent altern requereix una tensió aplicada variable quan la freqüència canvia per donar el parell especificat. Per exemple, si el motor està dissenyat per funcionar a 440 volts a 50Hz, la CA aplicada al motor s'ha de reduir a la meitat (220 volts) quan la freqüència canvia a la meitat (25Hz). Aquesta regulació es basa en els volts / Hz. En el cas anterior, la relació és de 440/50 = 8,8 V / Hz.
 Altres mètodes de control de tensió:
Altres mètodes de control de tensió:
 Altres mètodes de control de tensió:
Altres mètodes de control de tensió:A més del control de volts / Hz, mètodes més avançats com el control directe del parell o el DTC, Modulació de l'amplada del pols vectorial espacial (SVPWM) , etc també s'utilitzen per controlar la velocitat del motor. Controlant la tensió del motor, es pot controlar amb precisió el flux magnètic i el parell. En el mètode PWM, els commutadors inversors produeixen una ona quasi sinusoïdal a través d’una sèrie d’impulsos estrets amb durades de pols Pseudo sinusoidals variables.
Interfície de funcionament:
Aquesta secció permet a l'usuari arrencar / aturar el motor i ajustar la velocitat. Altres instal·lacions inclouen la inversió del motor, el canvi de control de velocitat manual i automàtic, etc. La interfície de funcionament consisteix en un panell amb pantalla o indicadors i comptadors per mostrar la velocitat del motor, la tensió aplicada, etc. Generalment es proporciona un conjunt d’interruptors de teclat. per controlar el sistema.
Inici incorporat -Soft:
En un motor d’inducció ordinari, encès mitjançant un interruptor de corrent altern, el corrent extret és molt superior al valor nominal i pot augmentar amb l’augment de l’acceleració de la càrrega per aconseguir la màxima velocitat del motor.
D'altra banda, en un motor controlat per VFD, inicialment s'aplica baixa tensió a baixa freqüència. Aquesta freqüència i tensió augmenten a una velocitat controlada per accelerar la càrrega. Això desenvolupa gairebé més parell que el valor nominal del motor.
Commutació del motor VFD :
La freqüència i la tensió aplicada es redueixen primer a un nivell controlat i després es continuen disminuint fins que es torna zero i el motor s'apaga.
Circuit d'aplicació per controlar la velocitat del motor d'inducció monofàsic
L’enfocament és relativament senzill pel que fa al circuit de potència i al circuit de control. A la part d’entrada, s’utilitzen duplicadors de tensió i, a la sortida, s’utilitza un pont H o un inversor de dues fases, tal com es mostra a la figura 2. Un extrem dels bobinatges principal i inicial estan connectats a cada mig pont i al altres extrems estan connectats al punt neutre de la font d'alimentació de CA.
El circuit de control requereix quatre PWM amb dos parells complementaris amb una banda morta suficient entre les sortides complementàries. Les bandes mortes PWM són PWM0-PWM1 i PWM2-PWM3. El PIC16F72 no té PWMs dissenyats al maquinari per produir la manera que necessitem. Pel que fa a la VF, el bus de corrent continu se sintetitza variant la freqüència i l'amplitud. Això donarà dos voltatges sinusoïdals desfasats.
Si la tensió aplicada al bobinatge principal es retarda en 90 graus del bobinatge inicial, el motor funciona en una direcció (és a dir, cap endavant). Si volem canviar el sentit de la rotació, la tensió aplicada al bobinatge principal és conduir el bobinat inicial.
Espero que tingueu una idea sobre la unitat de freqüència variable per al motor d’inducció de l’article anterior. per tant, si teniu cap pregunta sobre aquest concepte o elèctric i projecte electrònic Si us plau, deixeu la secció de comentaris a continuació.