El missatge explica un circuit de llum de fre innovador que utilitza la detecció de velocitat del vehicle que podria ser una moto. El circuit implementa un interruptor de llum de fre avançat ACTIVAT que garanteix a l'usuari una experiència de conducció molt més segura. La idea va ser sol·licitada pel senyor Rayan.
Objectius i requisits del circuit
- Tinc una idea, generalment, els llums de fre d’una moto només s’encenen quan es posen els frens. Però normalment la velocitat de la motocicleta es redueix canviant la marxa. Per tant, podeu fer un circuit de manera que els llums de fre s’encenguin en funció de la velocitat reduïda al motor, tot i que els frens estiguin aplicats o no.
- En moto .. vull instal·lar un far automàtic. Els fars automàtics s’encenen quan el motor arrenca i baixa quan el motor s’ha apagat.
- I també es pot fer un circuit que tingui un dimmer automàtic junt amb fars automàtics .. !! I també al mateix circuit. També hauria de tenir un punt de càrrega per carregar un telèfon mòbil de la bateria.
- I vull fer un circuit en què s’hagi de mostrar la marxa de la moto en una pantalla ...! Igual que com s'activa l'indicador esquerre, es mostra que l'indicador s'ha creat a la pantalla.
- De la mateixa manera, quan canviïs de marxa, també hauria de mostrar-me en quina marxa condueixo la meva moto.

El disseny
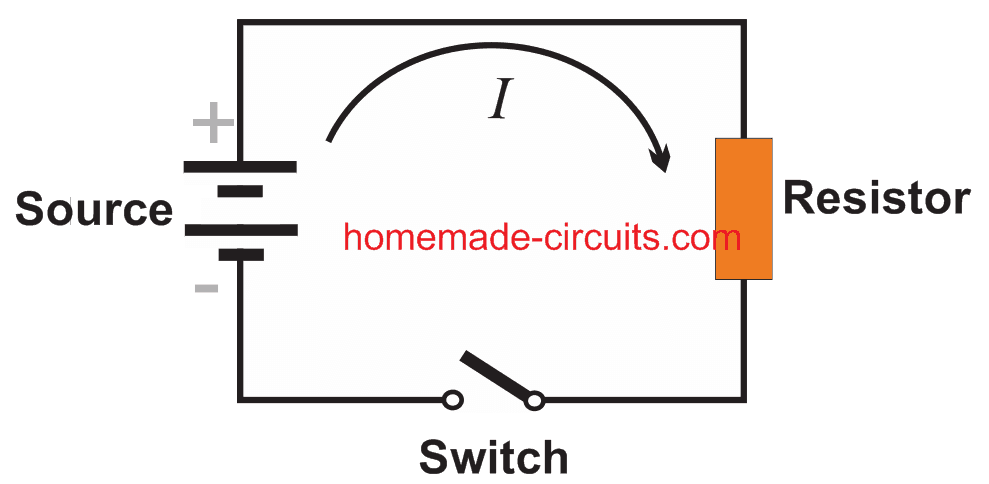
Com es mostra a la figura anterior, el circuit de llum de fre proposat que utilitza la detecció de velocitat consta de dues etapes principals, és a dir, l’etapa del circuit del tacòmetre IC 555 i la següent etapa del circuit del conductor LED del mode de punt IC LM3915.
L'etapa del circuit del tacòmetre es configura com un integrador per processar els senyals del rellotge des del dispositiu de captació de la moto.
La bobina de recollida tradueix la velocitat del motor en una velocitat de rellotge (Hz) que s’aplica a la base de la BC547 associada al circuit IC 555.
Aquests rellotges es processen i es converteixen en una tensió variable exponencialment a la xarxa RC connectada amb el pin número 3 de l'IC 555.
La sortida integrada anterior s’alimenta a l’entrada de detecció de l’etapa de controlador de mode de punt LED LM3915 indicada.
Els 10 LED connectats a través dels pins de sortida del LM3915 responen als nivells de tensió de pujada i baixada exponencial de la sortida IC 555 i, en conseqüència, produeixen una mínima lògica de salt seqüencial a través d’aquests LED, que s’encenen en la mateixa seqüència d’esquerra a dreta i viceversa.
Com que l'IC està configurat en mode punt, només s'encén un LED alhora que apaga els anteriors a mesura que la seqüència avança o balla al llarg de la línia.
Aquest moviment amunt / avall dels LEDs representa la velocitat del vehicle (o el nivell de marxa) i aquest resultat és aprofitat pel parell de transistors per encendre els llums de fre detecció de velocitat .
Com funciona
La idea aquí és detectar la velocitat i encendre els llums de fre només quan es detecta que la velocitat disminueix relativament més ràpidament i ignora les transicions més lentes o el canvi de marxa retardat.
Això és important per assegurar-se que els llums de fre no s’encenen en canvis normals de marxa inferiors destinats només a reduir la velocitat, en lloc d’aturar el vehicle en alguna destinació propera.
Això s’implementa mitjançant l’ús intel·ligent dels dos pinouts (seleccionats arbitràriament) i dels dos transistors BC557 respectius connectats amb els pinouts pertinents de l’IC LM3915.
El valor predeterminat al pin # 5 de l’IC s’ajusta de manera que a velocitats i nivells d’engranatges relativament més alts, l’últim LED de la seqüència del pin # 10 s’encén (activat), el qual correspon encendre el transistor BC557 situat al costat dret.
Durant aquest temps, el costat esquerre BC557 que es mostra connectat al pin # 15 es manté apagat (ja que només el pin # 10 està ON, la resta estan apagats), per tant, el controlador LED que utilitza el TIP122 també es manté apagat i, en conseqüència, els llums de fre també estan apagats.
Ara, en cas que el vehicle que podria ser una motocicleta estigui pensat per ser aturat pel pilot i, per tant, la seva velocitat es redueixi relativament ràpidament, es produirà la sortida del LM3915 seqüenciant cap enrere proporcionalment i tocant al pin # 15.
Atès que es pot esperar que la seqüenciació anterior es produeixi a una velocitat més ràpida, el BC557 al pin # 10 es manté engegat per la seva xarxa RC base fins i tot mentre el seu activador de base s'ha mogut i seqüencia a través del pin # 15.
En aquest moment es pot esperar que el BC557 estigui engegat i que el controlador LED juntament amb els llums de fre també estiguin engegats ... els llums de fre ara s’encenen intensament durant algun moment fins al pin de temps # 10 BC557 és capaç de mantenir el nivell de càrrega del condensador base fins al punt de commutació òptim.
Anterior: IC 555 Pinouts, circuits estables, monoestables i biestables amb fórmules explorades Següent: LM35 Pinout, full de dades, circuit d'aplicacions