Els circuits integrats de la sèrie TSOP17XX són dispositius especials de sensor d'infrarojos construïts per respondre a un rang específic de freqüències d'infrarojos i convertir-los en una sortida de polsada elèctrica. Així, presenta una immunitat infal·lible a altres formes de senyals IR.
A causa d'aquesta freqüència de funcionament específica del centre o del pas de banda d'un TSOP17XX, es fa difícil utilitzar aquests sensors per dissenyar circuits de control remot basats en freqüències desitjats o personalitzats.
En aquest post intentarem esbrinar una idea per permetre que aquests sensors funcionin amb qualsevol freqüència única desitjada perquè el circuit es pugui fer completament infal·lible.
Principi bàsic de funcionament dels mòduls de sensor TSOP17XX
Si ens referim a la fitxa tècnica del sensor IR TSOP17XX trobem que l’IC té algunes pautes de funcionament crítiques per garantir un funcionament correcte i òptim del sensor en resposta a un senyal IR.
Per permetre el funcionament correcte del sensor, el senyal IR ha d'oscil·lar-se al valor de freqüència central de pas de banda dels dispositius i modular-lo a ràfegues de 10 a 70 cicles, amb un cert espai després de cada cicle, tal com es mostra a la imatge següent.

La imatge superior mostra clarament que el feix IR de la Tx ha de ser pulsat amb la freqüència central de l’IC que generalment es troba entre 30kHz i 39kHx i modulat amb ràfegues de 10ms d’interval.
El TSOP respon a aquest senyal de freqüència central i s'activa, produint una forma d'ona replicada a la seva sortida, en què els 38 kHz es distribueixen en ràfegues de polsos d'ona quadrada normals.
Aquesta complexa forma d’ona operativa garanteix una major immunitat contra moltes freqüències espúries que poden estar presents a l’atmosfera emanades de bombetes, CFL lke, làmpades fluorescents, etc.
Inconvenient dels sensors TSOP17XX
Tot i que el sensor presenta una operació infal·lible a causa d’aquest complex patró de recepció de senyals, la freqüència central fixa dels sensors TSOP restringeix el seu ús només a aquest rang de freqüències específic, cosa que fa impossible crear circuits de control remot IR personalitzats mitjançant aquests xips.
A causa d'aquest inconvenient, un sistema de control remot basat en TSOP es pot operar normalment mitjançant qualsevol auricular de control remot de TV o DVD i mitjançant qualsevol dels botons de la unitat de control.
Tanmateix, en electrònica sempre hi ha una solució alternativa per a tot, i per a aquests sensors també podem crear un disseny que ens permeti utilitzar el CI amb la freqüència única seleccionada de la nostra elecció, de manera que el receptor només es commute mitjançant un parell de Tx compatible compatible i no amb cap telèfon remot comú disponible.
Disseny d'un circuit de control remot TSOP basat en freqüència únic
A partir de la discussió anterior, vam entendre que els sensors basats en TSOP requereixen ràfegues de freqüència de 38 kHz o la freqüència central especificada per funcionar, cosa que indica que el senyal inclou dues freqüències en què la freqüència central és constant, però la freqüència de ràfegues és variable i no és crítica. .
La idea és captar aquesta freqüència de ràfega al nostre favor i utilitzar un filtre que pugui reconèixer aquesta freqüència per activar la sortida.
El circuit de filtre es pot dissenyar fàcilment mitjançant un Circuit descodificador de to LM567 , i utilitzeu-lo per descodificar una freqüència de ràfega particular des de la sortida del sensor TSOP al costat del receptor.
El concepte bàsic es pot veure al següent diagrama.
Esquema de connexions 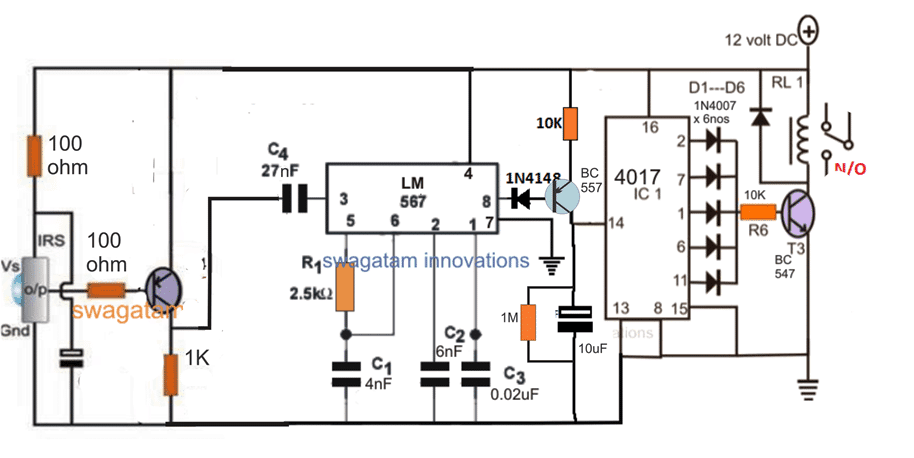

Funcionament del circuit
En referència al diagrama de circuits anterior per implementar TSOP17XX amb freqüències personalitzades, veiem que consta de 3 etapes bàsiques:
- l’etapa del sensor TSOP17XX
- l’etapa del detector de freqüència basat en LM567
- i el xanclet basat en IC 4017 o escenari de circuit bistable.
L'escenari TSOP17XX es configura en el seu mode estàndard, que recull la freqüència modulada de 38 kHz de la unitat Tx del transmissor i crea una ona quadrada polsada tal com s'indica al primer diagrama.
Es pot esperar que aquesta sortida del TSOP contingui la freqüència de ràfega que ens interessa. Es pot establir a 1 kHz, 2 kHz o qualsevol cosa inferior a 10 kHz.
Ara volem que el nostre decodificador de to LM567 detecti aquesta freqüència modulada correctament, per tant, hem d’assegurar-nos que el R1 / C1 de l’etapa LM567 es calculi de manera que l’oscil·lador intern es bloquegi a la mateixa freqüència que coincideixi amb les ràfegues de freqüència de modulació de la sortida TSOP .
Un cop establerts aquests paràmetres, podem esperar que el LM567 es bloquegi tan bon punt es detecti la freqüència seleccionada a la sortida TSOP78XX, mentre que qualsevol altra freqüència de modulació és simplement rebutjada.
En detectar una freqüència assignada correctament, la sortida LM567 genera un senyal d’activació baix corresponent al seu pin # 8, activant el pin d’entrada basculant basat en IC 4017 IC # 14 mitjançant el PNP.
D'aquesta manera, podem assignar diferents freqüències úniques assegurant que l'activació del receptor només estigui habilitada a través del telèfon Tx coincident i no amb cap control remot de televisió comú.
Realització del circuit de transmissors personalitzats (Tx)
En la discussió anterior es va assabentar de com es pot operar un sensor TSOP17XX amb una freqüència personalitzada mitjançant una etapa de detecció de freqüència, però això també significa que el transmissor (Tx) també haurà de ser construït de manera única per generar els senyals IR personalitzats.
La següent figura mostra com es pot implementar mitjançant un únic IC 4049 i alguns elements passius:

Les 6 portes són totes de l'IC 4049, R3 pot ser de 10K resistències, mentre que les preseleccions poden ser de 100K. Els majúscules C1 hauran de ser seleccionats amb alguna experimentació pràctica. El díode pot ser un 1N4148, les resistències restants es poden seleccionar 2K2.
Com es pot veure, el parell superior de portes juntament amb R3, preset i C1 es configura com un oscil·lador de funcionament lliure, la secció inferior també té una etapa idèntica.
La secció superior s’alimenta a una porta intermedia de memòria intermèdia la sortida de la qual es connecta finalment amb el fotodiode IR del transmissor.
Tota la secció està configurada per generar la freqüència central bàsica per a la compatibilitat TSOP17XX, que pot variar de 32 kHz a 38 kHz en funció de les especificacions del sensor seleccionat.
Se suposa que l'oscil·lador inferior és una etapa moduladora de baixa freqüència que es pot veure integrada amb la secció superior a través d'un díode. Aquesta baixa freqüència canvia la freqüència alta superior per generar les 'ràfegues de 38 kHz' necessàries al díode del transmissor IR.
Aquesta baixa freqüència es converteix en realitat en la nostra freqüència única, o la freqüència de control remot personalitzada que s’ha de fer coincidir amb la freqüència LM567 perquè les dues freqüències es donin la mà durant la comunicació IR entre les unitats Tx i Rx.
La freqüència baixa es podria seleccionar des de qualsevol punt entre 1kHz i 10kHz, i aquest rang seleccionat s’hauria d’establir amb precisió per a l’etapa LM567 ajustant adequadament els seus valors R1 / C1.
Això conclou la nostra discussió sobre com modificar un circuit de sensor TSOP17XX per acomodar rangs de freqüències especials personalitzats o rangs de freqüències seleccionats de manera única per fer que el sistema de control remot sigui absolutament infal·lible i personal.
Si teniu dubtes sobre el concepte, el quadre de comentaris és vostre.
Anterior: Introducció al sensor de color RGB TCS3200 Següent: Circuit de detecció de color amb codi Arduino