En aquesta part de l'article coneixem un mètode innovador per convertir el mecanisme de premsa de pedals en vehicles elèctrics en un senyal elèctric que correspongui, que es pot utilitzar per processar el control de velocitat del vehicle.
El concepte explicat funcionarà com un accelerador electrònic, que augmentarà la velocitat del vehicle linealment quan es prem gradualment el pedal, i viceversa, mitjançant la tecnologia PWM
La idea va ser sol·licitada pel senyor Lokesh Maini
Especificacions tècniques
Sóc un mecànic, treballo actualment en un vehicle elèctric i vull controlar la velocitat del meu motor mitjançant un pedal. No rebo un controlador per al meu motor, si us plau, ajudeu-me a construir el meu propi
agraït
Les especificacions del motor són de 36 cc, 43 amp i 1,5 CV de motor de corrent continu.
El disseny mecànic
Una versió electrònica d’un accelerador de pedals requerirà principalment un mecanisme per convertir la pressió mecànica del pedal en un senyal elèctric que correspongui, de manera que aquest senyal es pugui processar a través d’una etapa de processador de senyal per a la conversió desitjada en un control de velocitat pràctic de la vehicle.
Es poden provar molts conceptes, com ara utilitzar un sensor de càrrega piezoelèctrica, un sensor de càrrega capacitiva, un sensor de ressonància, etc. En aquest article aprendrem un mètode molt més senzill ideat per mi que incorpora un conjunt LED / LDR per aconseguir el mateix .

A la disposició electromecànica que es mostra a la figura anterior, podem veure els components integrats següents:
Un petit engranatge unit amb un mecanisme de cargol.
El cap del cargol té una superfície reflector blanca mat
Un conjunt LED / LDR situat davant del cap de cargol.
Com funciona el mecanisme proposat.
L'engranatge que es mostra a la figura anterior s'ha de bloquejar amb un altre engranatge que tingui una relació que pugui ser 10 vegades superior a aquesta.
L'engranatge més gran s'ha de configurar amb el mecanisme del pedal de manera que iniciï un moviment de rotació en resposta a la pressió del pedal.
La resposta de rotació dels engranatges produirà al seu torn un moviment cap endavant del cap de cargol a través de la cambra on es troba el conjunt LED / LDR.
El procés farà que la LDR rebi una quantitat de llum reflectida proporcionalment variable del LED.
Aquestes dades variables (en forma de resistència variable) corresponents a la depressió del pedal es poden alimentar a un circuit de processador de senyal per fer complir el control de velocitat previst del vehicle en particular.
A la següent missatge aprendrem l’etapa del processador de senyals mitjançant la tècnica PWM.
A la secció superior vam conèixer un simple conjunt de convertidors electromecànics per transformar l’acció del pedal en un senyal elèctric que varia proporcionalment.
Conversió de l'acció del pedal a PWM
Ara estudiarem una implementació de circuits que ens permetrà convertir el senyal elèctric del pedal en un senyal PWM que correspongui per al control de velocitat del motor previst del vehicle.

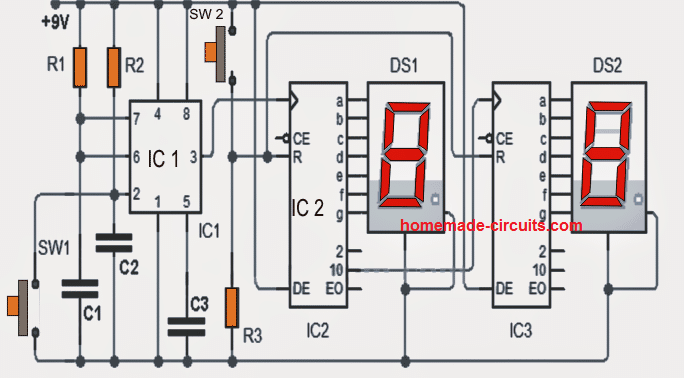
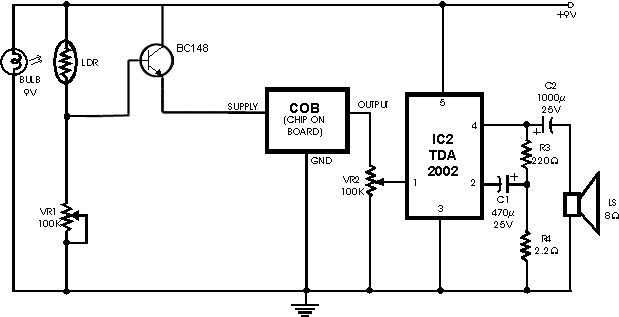
En referència al diagrama de circuits anterior, podem avaluar el funcionament del circuit amb l'ajut dels punts següents:
IC1 es configura com un generador de polsos de 80Hz amb un temps d’encès màxim i un temps d’APAGAT mínim com a cicle de treball
IC2 es presenta com un comparador que converteix primer el pols de 80Hz aplicat al pin2 amb ones triangulars generades al pin6 i compara les ones triangulars amb la tensió moduladora disponible al pin5.
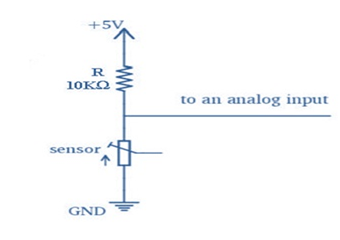
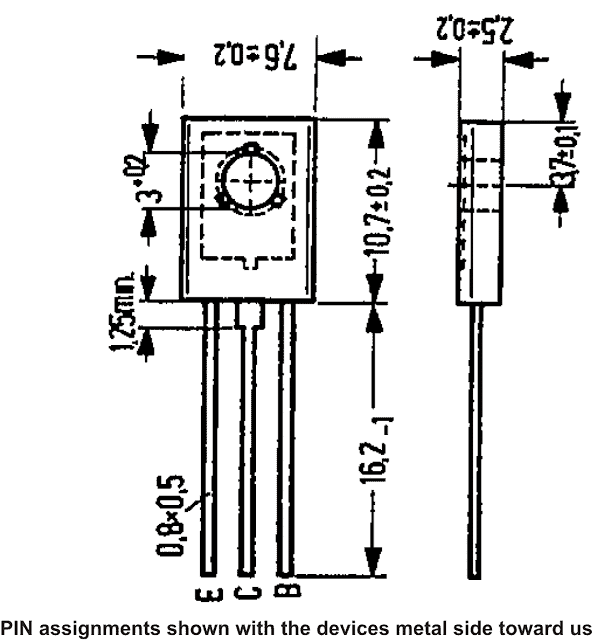
El voltatge modulador pin5 es deriva d’un emissor BJT BC547 que es configura com un col·lector comú amb la seva base connectada amb les entrades LDR aconseguides a partir de les accions del pedal.
Les diferents resistències en resposta a la pressió del pedal es comparen amb la configuració preestablerta de 100 K i es desenvolupa una magnitud proporcional de tensió a la base del transistor que converteix l’entrada de baix corrent en un senyal de corrent alt equivalent sobre el pin5 d’IC2.
Aquest nivell de potencial instantani és acceptat i processat per IC2 generant una magnitud proporcional de senyals PWM per al mosfet i el motor connectat.
Així, la velocitat del motor es controla i varia segons els PWM fluctuants en resposta a les pressions de pedals del vehicle.
Els procediments anteriors converteixen efectivament les accions del pedal en operacions controlades del motor del vehicle i de la seva velocitat.
Com configurar el circuit.
És molt fàcil.
- Premeu el pedal fins al punt màxim de manera que el cap del cargol arribi a la posició més propera possible davant del conjunt LED / LDR.
- A continuació, ajusteu el valor predefinit de 100 k fins que el pin3 de l'IC2 comenci a generar PWM amb una amplada màxima. Això es pot confirmar mesurant la tensió del pin3 perquè sigui el més a prop possible de la tensió d'alimentació del circuit, és a dir, de 5 V.
- Un cop fet això, es pot suposar que el procediment de configuració és complet.
- Ara es podrien verificar els resultats prement el pedal a diferents nivells i comprovant que la velocitat del motor varia de manera idèntica.
Anterior: Circuit de comptador ESR simple Següent: Com construir un circuit de llum de creixement