

Robot d'espionatge de camp de guerra amb càmera de visió nocturna
El robot espia com el seu nom indica és el que s’utilitza amb l’objectiu d’espiar territoris enemics. Les seves aplicacions poden ser:
- En el moment de la guerra, es pot utilitzar per recopilar informació del terreny enemic i controlar aquesta informació en una zona molt segura, i dissenyar amb seguretat un pla per al contraatac.
- Seguiment de localitzacions d’organitzacions terroristes i planificació d’un atac en el moment adequat.
- Fer vigilància de qualsevol zona afectada per desastres on els éssers humans no puguin anar.
Una breu idea sobre el robot d'espionatge de camp de guerra
De manera que tinguem una breu idea de com podem utilitzar un robot en camps de guerra amb finalitats d’espionatge. Tot el que es necessita és una càmera sense fils instal·lada al circuit del robot que capti imatges i vídeos de territoris enemics i transmeti aquestes imatges, que són rebudes per la unitat receptora del televisor.
Podem dissenyar un simple prototip de guerra robot d'espionatge de camp que es pot controlar remotament i les imatges transmeses per la càmera es poden controlar i analitzar en un televisor.
Implementació de maquinari del robot d’espionatge de camp de guerra
Tot el que hem de tenir són els components següents per dissenyar un robot d’espionatge de camp de guerra a part d’una base amb rodes i motors.
- Unitat de sensor: una càmera de visió nocturna sense fils: A part del que consisteix una càmera bàsica, consisteix en una unitat transmissora. Capta imatges i transmet aquestes imatges a través del transmissor en forma de senyals digitals, que són rebudes per la unitat receptora connectada al televisor o a l'ordinador. La càmera es pot allunyar fins a 30 milles del receptor. A càmera de visió nocturna pot rebre il·luminació amplificant la llum visible mitjançant intensificadors d’imatge o bé utilitzant la llum infraroja directament per objectes: imatges tèrmiques o llum infraroja reflectida per la il·luminació d’infrarojos propers a objectes
- Una unitat receptora: El robot també consisteix en una unitat receptora que rep els senyals de comandament per controlar els motors i, per tant, la unitat robot.
- Actuadors: Consisteix en dos motors de corrent continu com a actuadors que proporcionen moviment invers i endavant al robot.
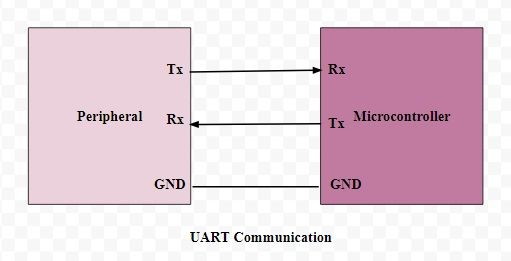
- Unitat de control: Consisteix en una unitat de transmissor remot que consisteix en un microcontrolador, un codificador i un mòdul de RF i una unitat de receptor incrustats al circuit que consisteix en un mòdul de receptor de RF, un microcontrolador i un descodificador.
Com funciona la càmera de visió nocturna d'un robot espionatge de camp de guerra?
La càmera de visió nocturna sense fils integrada al robot està formada per un transmissor sense fils. Es col·loca un grup de LEDs IR que s’utilitzen per proporcionar llum IR a les fonts d’imatge. La raó per la qual es prefereix la llum IR és que, de nit, sol ser fosca i, atès que qualsevol càmera necessita llum per a la il·luminació, la llum infraroja és l’opció més preferida, ja que tots els objectes emeten una gamma de llum infraroja. La càmera s’alimenta amb una bateria de 12 V i captura aquestes imatges i les transmet a la unitat receptora connectada a una unitat de televisió. Les imatges es converteixen en senyals digitals mitjançant la unitat transmissora i la unitat receptora rep aquests senyals digitals i els converteix en imatges i aquestes imatges o vídeos es controlen i analitzen en una unitat de televisió.

Esquema de blocs que mostra el funcionament bàsic del robot amb càmera de visió nocturna
Control del robot d’espionatge del camp de guerra
Tot el control del robot es realitza de forma remota. Consisteix en una secció de transmissor que transmet la informació requerida a la secció del receptor. El robot només es cobreix prement uns botons al costat del transmissor.

Esquema de blocs que mostra el robot d'espionatge del transmissor del camp de guerra
La unitat transmissora està formada per un codificador que rep l'entrada paral·lela de dades del microcontrolador a través dels botons i transmet aquestes dades paral·leles en format sèrie a través del mòdul RF. En prémer el polsador respectiu, el microcontrolador es programa per enviar senyals rellevants al codificador en forma paral·lela. El codificador converteix aquests senyals paral·lels en forma sèrie que haurà de transmetre el mòdul RF. Aquestes dades serials es modulen amb un senyal portador mitjançant un transmissor de RF i són el transmissor. Per exemple, si premem el botó esquerre, el microcontrolador envia l'ordre a la unitat receptora a través del codificador i del mòdul RF.

Esquema de blocs que mostra el receptor del robot d'espionatge del camp de guerra
La unitat receptora consisteix en un mòdul receptor RF que demodula el senyal rebut i un descodificador que rep les dades serials a través del mòdul receptor RF i les converteix en forma paral·lela. El microcontrolador utilitza aquestes dades per donar un senyal de control adequat al controlador IC del motor per controlar el funcionament dels dos motors. Així, el robot es pot moure cap endavant o en direcció inversa controlant el motor, mentre la càmera fa el seu treball simultàniament.
Robots en militar
Ara que teníem una breu idea sobre els robots de camp de guerra, recordem breument els robots pràctics en defensa.
Una de les característiques bàsiques dels robots utilitzats en operacions militars és que no són completament automàtics. En realitat, són controlats remotament pels éssers humans. Els robots o màquines no tripulades, tal com s’anomenen, poden ser qualsevol objecte en moviment o un avió volant equipat amb tot l’equip necessari com a sensors, LIDARS (RADARS de comunicació basats en làser), càmeres, etc. territoris.
Hi ha tres tipus de màquines no tripulades utilitzades en operacions militars:
- Vehicle terrestre no tripulat (UGV): s’utilitzen amb finalitats terrestres. Poden carregar molt, moure’s per terrenys desiguals i disposar de diversos sensors i càmeres.

Gladiator Tactical UGV
- Vehicle aeri no tripulat (UAV): s’utilitzen per transportar armes aèries i bàsicament són màquines voladores.

Vehicle aeri no tripulat MQ-9 Reaper
- Vehicle submarí sense tripulació (UUV): són bàsicament submarins o màquines que poden inspeccionar sota l'aigua.

Talisman UUV
Ara que ja tenim coneixement del robot de camp de guerra, anem a la tasca de saber sobre l’ús de robots en les operacions militars del nostre país i com progressa la nostra organització de defensa en aquest camp?
Crèdits fotogràfics:
- Gladiator Tactical UGV de wikimedia
- Vehicle aeri no tripulat MQ-9 Reaper de wikimedia
- Talisman UUV de enginyersgarage







{kind=link}
{kind=link}