Els robots es poden utilitzar en moltes aplicacions en indústries, militars i domèstiques. Un dels principals usos dels robots és un bé per als éssers humans. Tant si es tracta de qualsevol tipus de situacions perilloses, com ara un incendi o un lloc ple de mines terrestres, els robots poden resoldre fàcilment aquests problemes. Vegem, doncs, aquests dos tipus de robots: un robot amb detecció de mina terrestre i un robot contra incendis
Robot de detecció de mines terrestres
Com detectar la meva terra amb els robots?
Una de les aplicacions més importants de la robòtica és la defensa. Un robot militar és un vehicle controlat a distància amb moltes funcions úniques. Pot ser un vehicle robotitzat amb una càmera per espiar, un vehicle robotitzat amb una pistola LÀSER per detectar i destruir objectius o un robot amb un metall detector per detectar la presència de mines terrestres.
Una de les formes tradicionals i convencionals de detecció de mines és l’ús de personals entrenats que cerquen manualment metalls o mines mitjançant un detector de metalls. No obstant això, això és insegur, car i també lent.
Per superar aquest problema, es prefereix un sistema molt més avançat.
Un parell de maneres de detectar mines terrestres:
- Mitjançant un robot que pot introduir una sonda al terra que pot detectar els objectes sota el sòl i determinar el tipus de material.
- Utilitzar un robot amb un detector de metalls que detecti la presència d’elements conductors com les mines terrestres i alarmi l’usuari.
Abans d’aprofundir en els detalls sobre el segon tipus, és a dir, el robot amb un detector de metalls, recordem breument els dos termes importants: mines terrestres i detector de metalls.
A Mina de terra és un dispositiu explosiu col·locat deliberadament sota el sòl que explota quan s’activa per la pressió. Segons un informe estadístic, hi ha prop de 100 milions de mines terrestres en 70 països de tot el món. Una mina terrestre un cop col·locada pot funcionar fins a 50 anys. No és perillós !!

Un detector de metalls bàsic funciona segons el principi de la llei d’inducció de Faraday. Consisteix en una bobina que s’energia per desenvolupar un camp magnètic pulsatiu al seu voltant. Quan la bobina arriba a les rodalies d’un element conductor com el metall (una mina), s’hi indueix un corrent elèctric (corrent de Foucault). El corrent de Foucault induït provoca el desenvolupament de camp electromagnètic al voltant del metall, que es retransmet a la bobina que desenvolupa un senyal elèctric que s’analitza. Més gran és la distància entre la bobina i el metall, més feble és el camp magnètic.
Un prototip simple:

Un simple prototip de vehicle robotitzat amb detector de metalls
Disseny del robot:
El vehicle robotitzat consta de les següents unitats:
- Una base rectangular per suportar tota l’estructura del robot, unida amb dues rodes per al moviment.
- Un parell de motors de corrent continu per proporcionar el moviment necessari al robot.
- Una unitat de control que consisteix en un receptor de RF que rep senyals d’ordres d’una unitat transmissora per controlar el controlador del motor i controlar-los en conseqüència.
- Un cop es detecta el metall, s’activa un circuit de detecció de metalls junt amb una alarma de timbre.
Com funciona el robot:
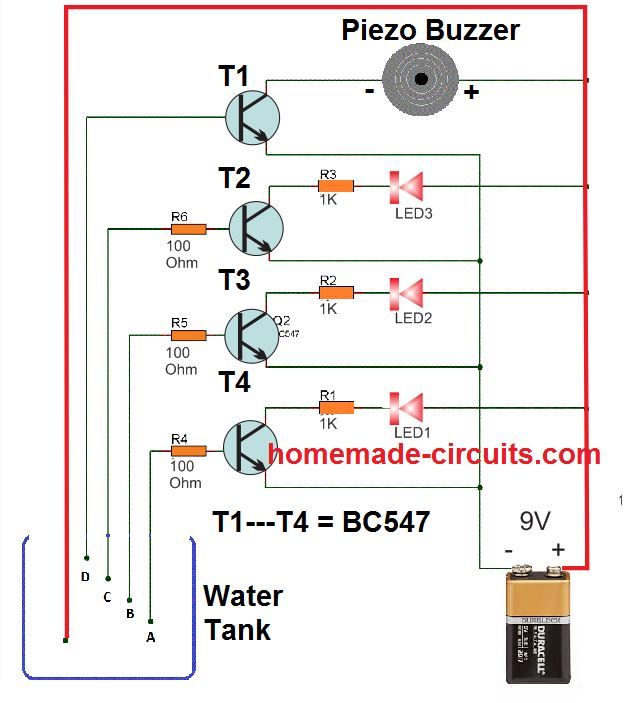
El circuit del detector de metalls incrustat als circuits de control del robot consisteix en un transistor que és accionat per un circuit oscil·lador sintonitzat format per la bobina. Quan es detecta un metall i es retransmet el corrent elèctric a través de la bobina, el transistor1 està en estat i condueix un altre transistor2 a la condició d’apagat. Aquest transistor3, al seu torn, condueix un altre transistor en estat apagat. Aquest transistor en particular 3 està connectat a un altre transistor4 que es connecta de manera que estigui en estat quan el seu transistor3 conductor estigui en estat apagat. El transistor 4 està connectat de manera que, si està en condicions, el brunzidor i el LED reben una polarització adequada i comencen a conduir-se.

Esquema de blocs de la unitat de detecció de metalls
El LED comença a brillar i el timbre comença a sonar. Així, quan es detecta un metall, l’alarma del brunzidor començarà a sonar i el LED brillarà.
Control del robot:
El simple prototip es pot controlar mitjançant la comunicació RF, que és un sistema de comunicació de curt abast. Les ordres es transmeten mitjançant un transmissor i són rebudes per un receptor incrustat al circuit del robot per controlar el moviment del robot.

Diagrama de blocs de la secció de transmissors
El transmissor consisteix en un conjunt de botons com endavant, enrere, aturat, esquerre i dret que es premen per proporcionar el moviment del robot en qualsevol direcció desitjada. Els polsadors estan connectats al port d'entrada del microcontrolador. El microcontrolador en rebre aquests senyals desenvolupa un senyal corresponent de 4 bits en forma paral·lela a través d'un altre port d'E / S, al qual està connectat un IC codificador. El codificador converteix aquests senyals en una forma sèrie de dades. El transmissor de RF modula aquestes dades serials, que es transmeten a través de l’antena.

Diagrama de blocs de la secció del receptor
La secció del receptor muntada al robot està formada pel receptor de RF que demodula aquest senyal. El CI del descodificador rep aquest senyal en forma de sèrie i desenvolupa les corresponents dades paral·leles de 4 bits a la seva sortida. El microcontrolador rep aquestes dades i, en conseqüència, proporciona un senyal de control al controlador del motor IC LM293D, que acciona els dos motors.
Vehicle robotitzat contra incendis:
El concepte de vehicle robòtic contra incendis està lluitant en un incendi. En els darrers anys hi ha hagut diversos accidents greus, inclosos els incendis i les explosions de bombes. Hem estat coneixent els accidents majors d'incendis, com ara les centrals nuclears, el petroli, els tancs de gas i les fàbriques de productes químics, que poden provocar empreses industrials d'incendi a gran escala en aquests llocs un cop iniciat el foc, que són molt greus. Milers de pobles han mort per aquesta incidència. Això és una lluita contra incendis vehicle robotitzat tecnologia. Aquest vehicle robotitzat solia trobar el foc i lluitar pels incendis.

Vehicle robotitzat contra incendis
Principi de funcionament del vehicle robotitzat contra incendis:
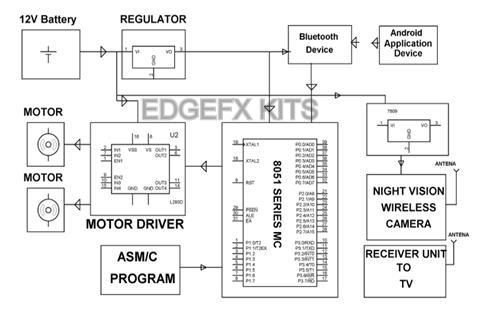
El vehicle robot carregat amb un cisterna d’aigua. La bomba es controla mitjançant comunicació sense fils (RF i comunicació mòbil). L'extrem del transmissor està connectat als polsadors. Mitjançant aquest botó, les ordres s’envien al receptor i controlen el moment del robot, com endavant, enrere, esquerre, dret. Els tres motors de l'extrem receptor estan connectats al microcontrolador.

Diagrama de blocs del transmissor

Diagrama de blocs del receptor
El transmissor de RF actua com a control remot de RF on el rang és de 200 metres. A la llar, les oficines i la indústria, els sensors d’incendi es mantenen en determinats llocs quan es produeix un foc a prop d’un sensor d’incendi. Els sensors són la sensació que el bit corresponent es transmet al receptor de RF. El receptor de RF està integrat amb un microcontrolador. Quan el receptor de RF rep els senyals que la informació passa al microcontrolador, el robot es mou cap als sensors de foc. Les ubicacions dels sensors s’emmagatzemen al microcontrolador. Un cop el robot arriba a la ubicació desitjada, el robot s’atura i activa el polvoritzador fins a aquest foc. Després de disparar, el robot passa a la posició inicial. Tot el circuit està controlat pel microcontrolador.
Tipus de vehicles robotitzats contra incendis:
Vehicle robotitzat contra incendis a casa :
L'acció de camp es limita a l'actual Flore of house. Aquest robot utilitza molts articles per a la llar per prendre foc quan algú dorm o està fora. Aquest robot s'utilitza per assegurar la llar i mitjançant aquesta aplicació s'obren totes les portes a Flore perquè aquest vehicle es mou d'un lloc a un altre lloc de la llar. La zona de lluita contra incendis ha de ser segura per no provocar un nou accident. La característica addicional d’aquest robot és operar a llarga distància.
Extinció d'incendis industrial:
La majoria de les indústries s’enfronten a problemes d’incendis com ara el gas, la benzina, les centrals nuclears, les indústries químiques, una gran quantitat de danys i la mort de més persones a les zones circumdants. Aquest robot té la força de portar foc a l’interior de la zona de combustió per subministrar aigua il·limitada. El foc provoca una visibilitat reduïda, calor extrema i moltes situacions més que poden provocar lesions.
Lluita contra incendis forestals:
Els incendis forestals són molt perillosos. Pot passar poc temps cremant una gran quantitat de superfície forestal. Fins i tot els departaments de bombers de la ciutat han de fer front als incendis forestals a la zona que envolta la ciutat. Alguns anys enrere, aproximadament 152 bombers van morir als anys noranta. La robòtica contra incendis forestals s’utilitza per agafar foc i lluitar contra foc. Aquest robot utilitza un dispositiu de control extern amb finalitats de comunicació sense fils. El mòdul està connectat amb l'extrem de sortida del qual s'utilitza per a l'extinció d'incendis forestals del robot. Les aplicacions com el sensor de pressió, el sensor de temperatura, el sensor de fum, el sensor d’infrarojos s’utilitzen per controlar el robot contra incendis forestals.
A la prompt!
Tot i que he fet una idea bàsica del robot amb un detector de metalls, encara existeix una pregunta important: com guiar el robot en terrenys irregulars que es desconeixen, especialment en entorns sotmesos a pluges intenses, pols i rang de temperatures calentes. Per trobar una resposta i publicar els vostres comentaris.
![Construeix un circuit simple convertidor Buck [Step Down Converter]](https://electronics.jf-parede.pt/img/3-phase-power/D0/build-a-simple-buck-converter-circuit-step-down-converter-1.jpg)