
A El robot és una màquina electromecànica dirigit per un circuit o un programa d’ordinador. Els robots han intercanviat humans amb l’ajut de realitzar tasques contínues i perilloses que els humans decideixen no fer. Present els robots es classifiquen en diferents categories en funció de les seves funcions i rendiment, com ara robots industrials, robots comercials, robots de servei i robots mòbils. Aquí hi ha un robot de servei que realitza les tasques contínues per donar la benvinguda a la gent mitjançant un moviment de la mà que representa 'Namaste' mitjançant un missatge de veu gravat. En general, quan convidem gent a casa, a festes, a les funcions matrimonials, al despatx, etc. Hem de concertar una persona per saludar-la i convidar-la a l'entrada. Si la quantitat de persones és baixa, la tasca és més senzilla. Però si saludeu centenars de persones, la tasca és difícil. Per superar aquest problema, aquí teniu un projecte, és a dir, un robot namaste amb control de veu.

Robot Namaste
Robot Namaste amb control de veu
El concepte principal d’aquest Namaste El projecte del robot consisteix a controlar els diversos servomotors mitjançant una placa Arduino. Aquest robot escaneja la gent que l’envolta i gira el cap al voltant de 180 °. Si reconeix a algú proper, desitgi a aquesta persona amb Namaste amb les dues mans pressionades. És la forma tradicional de desitjar a la gent a l'Índia. El aplicacions de robots participar en centres comercials, parcs, oficines per atraure la gent.
Esquema de blocs del robot Namastae amb control de veu
La següent figura significa el diagrama de blocs del robot Namaste amb control de veu. En aquest tipus de robots, es programen ordres de veu. Es pot connectar tota la placa de desenvolupament a la font d'alimentació comuna. La descripció de tots i cadascun dels blocs és la següent. El Font d'alimentació proporciona l'alimentació a tots els mòduls. Aquests mòduls requereixen corrent en mA i la tensió de funcionament serà de 5V.

Esquema de blocs del robot Namastae amb control de veu
Tauler Arduino
Arduino és un tipus d'eina basat en una simple placa de microcontrolador que s’utilitza per controlar i detectar el món físic que un ordinador de sobretaula. Per a la informàtica física hi ha diverses plataformes de microcontroladors disponibles. Les funcions importants d’un Arduino són el programari econòmic, de codi obert i extensible. El programari Arduino està disponible com a eina de codi obert i el llenguatge es pot ampliar a través de les biblioteques C ++.

Tauler Arduino
Sensor de ping
El sensor de ping utilitza SONAR per controlar la distància d’un objecte al seu voltant. Això s'utilitza com a sensor els ulls del robot per detectar l’obstacle. Per exemple, el sensor de proximitat. Ofereix una precisió de gamma excel·lent i lectures estables. El material negre o la llum solar no afecten el funcionament d’aquest sensor. Les especificacions del sensor de ping són el voltatge de 5 V, el corrent de 15 mA, l’angle del sensor NO> = 15 i la distància de detecció és de 2 cm ~ 450 cm.

Sensor de ping
A continuació es mostra la interfície del sensor de ping amb un Arduino. Hi ha quatre pins disponibles per connectar el sensor de ping amb una placa Arduino. Els quatre pins de la placa Arduino són GND, VCC, ECHO i TRIGGER. Els pins del tauler són D0-D13, ja que els pins 12 i 13 són pins d'entrada i sortida.
El microcontrolador Arduino ens ofereix una biblioteca de servocontrol que ens permet canviar els servos amb facilitat. En aquest projecte hem utilitzat 5 servos per regular els moviments del robot Namaste com el cap, el colze dret, el colze esquerre, l’espatlla dreta i l’espatlla esquerra. Aquí, els pins d'entrada / sortida digitals (D5, D6, D9, D10, D1) signifiquen a la placa Arduino connectada als servomotors.
IC de reproducció de veu
Aquest IC de reproducció de veu ofereix el missatge gravat que es reprodueix a la freqüència predefinida. La reproducció es mou a la unitat d'amplificació d'àudio.

IC de reproducció de veu
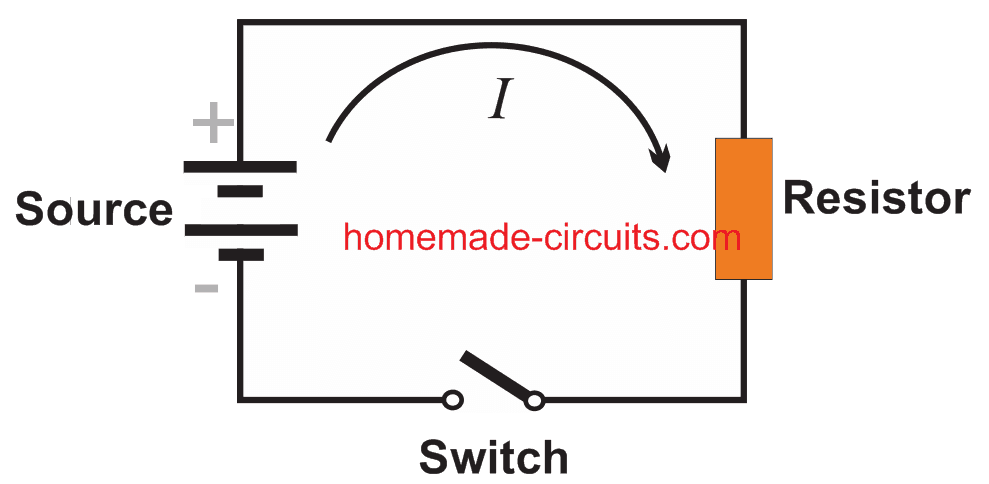
Relleu
A el relé és un tipus d'interruptor funciona elèctricament. El flux de corrent a través de la bobina del relé crea un camp magnètic que convida una palanca i canvia els contactes del commutador.

Relleu
Control de veu Namastae Robot Working
El funcionament del robot Namaste es pot fer en un procediment pas a pas juntament amb els resultats simulats. Quan el robot Namaste es troba en un primer estat, llavors el servomotor s del robot 2, 3, 4, 5 estan en estat OFF o zero. El cap del robot Namaste s’alterna de centre a dreta, esquerra i després cap enrere cap al centre a causa del gir del Servo motor1 de 0 ° -180 °. El moviment del cap del robot especifica que el robot Namaste busca un obstacle. Quan el sensor de ping detecta algun obstacle, la posició del cap del robot torna al centre i les relíquies del Servomotor1 en angle de 90 ° i s'apaguen. S’activa en estat BAIX.
Quan el servo motor 1 s’apaga, els motors restants, com ara servo4 i servo5, s’encenen. La línia de senyal s'activa per a les espatlles dreta i esquerra del robot Namaste. Ara les mans d’un robot poden augmentar el moviment. Els servomotors d'espatlla estan connectats als pins d'entrada i sortida digitals de la placa Arduino. Però les línies de senyal o aquests pins seran elevats i la posició del servo es canviarà a 90 °. Ara el servo4 i el servo 5 s’apaguen.
Finalment podem concloure que, l'objectiu principal d'aquest control de veu robot és proporcionar el servei d’acollir gent educadament detectant gent que hi caminava davant. Es pot utilitzar en diversos llocs públics, com ara parcs, centres comercials, festes, etc. Esperem que entengueu millor aquest concepte. A més, qualsevol consulta sobre aquest concepte o basat en arduino projectes de robots Si us plau, doneu els vostres valuosos suggeriments comentant a la secció de comentaris a continuació.
Crèdits fotogràfics:
- Tauler Arduino nyacknewsandviews
- Sensor de ping paral·laxi
- IC de reproducció de veu kealab
- Relleu awdirect
- Robot Namaste canstockphoto








{kind=link}
{kind=link}
{kind=link}
{kind=link}